На рис.10.1.9 и 10.1.10 приведены осциллограммы пуска турбоагрегата ГТЭ-110 на Ивановской ГРЭС. На этих рисунках представлены зависимости от времени частоты вращения турбоагрегата и выпрямленного тока преобразователя частоты.
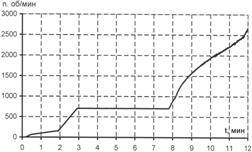
Рис.10.1.9 Частота вращения ТФГ-110 при пуске от ПУ-1
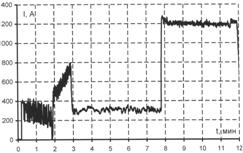
Рис.10.1.10 Выпрямленный ток ПУ-1 при пуске ТФГ-110
В соответствии с осциллограммами от начала пуска агрегата и до второй минуты осуществляется разгон при искусственной коммутации тока в инверторе преобразователя частоты. Со второй минуты до третьей разгон осуществляется при естественной коммутации тока. При этом увеличивается выпрямленный ток и существенно возрастает ускорение ротора турбогенератора. Затем до восьмой минуты система работает при стабилизации частоты вращения турбоагрегата на уровне 700-750 об/мин. На восьмой минуте пусковое устройство начинает форсированный разгон турбоагрегата с максимальным выпрямленным током. При этом в турбине осуществляется зажигание топлива, и она включается в работу – в процесс разгона вращающихся масс. Далее пусковое устройство работает с постоянным выпрямленным током. При увеличении выпрямленного напряжения преобразователя до номинального значения начинается процесс развозбуждения генератора по мере увеличения частоты вращения. На двенадцатой минуте процесса разгона выпрямленный ток преобразователя уменьшается до 0, и преобразователь отключается.
Один из вопросов, который нуждается в более подробном освещении, заключается в обеспечении начальных условий успешного пуска турбоагрегата. При отсутствии датчика положения ротора турбоагрегата обычно выполняется процедура определения начального положения ротора, затем осуществляется возбуждение генератора, после чего с помощью преобразователя частоты в определенную пару фаз обмотки статора подается ток, и начинается движение ротора в заданном направлении. Если возникла какая-либо ошибка и ротор начал вращаться в другом направлении, то возможна поломка валоповоротного устройства и другие нежелательные последствия. Если длительность возбуждения генератора перед пуском оказалась недостаточной, то пуск также может оказаться неудачным.
При отсутствии датчика положения ротора возможно несколько способов определения этого положения.
Один из способов заключается в анализе ЭДС фаз статора при форсированном возбуждении неподвижного ротора. В этом режиме работы в фазах наводятся трансформаторные ЭДС, и их амплитуды в фазах различны и зависят от углов поворота оси d ротора относительно осей фаз. По соотношению амплитуд ЭДС в фазах достаточно точно определяется положение ротора. Этот способ достаточно прост, весьма универсален, но не всегда удобен при практической реализации. Указанные трансформаторные ЭДС обычно малы по сравнению с номинальными напряжениями машин и преобразователей. Их относительная величина зависит от типа машины, от кратности форсировки напряжения возбуждения.
Другой способ определения положения ротора основывается на подаче в различные пары фаз обмотки статора импульсов тока. Упрощенная схема определения положения ротора и диаграмма токов и напряжений представлены на рис.10.1.11.
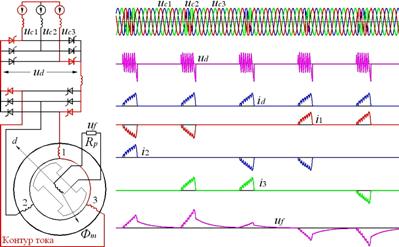
Рис.10.1.11 Схема и диаграмма определения положения ротора
В соответствии с рис.10.1.11 через преобразователь частоты на заданное короткое время подается импульс тока в две фазы синхронной машины. В магнитопроводе машины появляется магнитный поток Фm, который направлен относительно оси d ротора под некоторым углом, зависящим от положения ротора. В результате изменения этого потока на обмотке возбуждения появляется импульс напряжения. После измерения действующего значения этого импульса выдерживается фиксированная пауза, необходимая для затухания всех токов и магнитных потоков. После паузы импульс тока подается в другую пару фаз синхронной машины. При этом магнитный поток Фm поворачивается на угол, кратный 60 эл. град. В этом случае также измеряется действующее значение импульса напряжения возбуждения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.