Мгновенные значения интегральных составляющих напряжений управления
Полученные на выходе регуляторов тока напряжения управления поступают в блоки БС5-БС10 сравнения с пилообразными опорными напряжениями. На выходе этих блоков формируются импульсы управления транзисторами. Каждый блок формирует импульсы управления двумя транзисторами одной подфазы АИН.
Для управления однотактным трехфазным мостовым АИН используется одно пилообразное двухполярное напряжение. Пилообразные напряжения блоков управления двумя транзисторными мостами, соединенными параллельно через дроссели, взаимно сдвинуты по фазе на угол π на частоте опорных напряжений. Все пилообразные напряжения АИН имеют одну частоту и синхронизированы.
На рис.11.2.6 представлена диаграмма пуска и реверса ГЭД, рассчитанная на математической модели СЭД. При расчетах использована вентиляторная характеристика нагрузки при пусках и реверсивная характеристика при реверсах.
В соответствии с диаграммой рис.11.2.6, после подключения привода к источнику питания ШИП заряжает конденсаторы на входе инверторов от уровня напряжения источников до заданного напряжения (900 В). При этом СЭД работает на холостом ходу.
Через заданное время поступает сигнал на пуск ГЭД. По этому сигналу плавно с заданным ограничением ускорения увеличивается заданная скорость. Система управления инверторами контролирует заданную и фактическую скорости ГЭД и с помощью пропорционально-интегрального регулятора формирует амплитуду заданного тока ГЭД. Регуляторы токов фаз, получая сигналы по заданным и фактическим токам формируют напряжения управления. При этом происходит плавный разгон ГЭД, что видно из рис.11.2.6. В конце пуска ГЭД система выходит на номинальный режим работы.
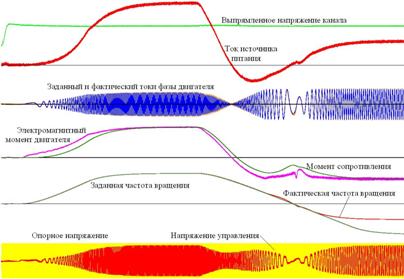
Рис.11.2.6 Пуск и реверс ГЭД
В заданный момент времени поступает сигнал на реверс ГЭД. По этому сигналу заданная частота вращения ГЭД плавно изменяется в сторону отрицательных значений в течение заданного времени при заданном ограничении ускорения. При этом регулятор частоты вращения формирует амплитуду заданного тока двигателя, а регуляторы токов фаз формируют такие мгновенные значения напряжений управления, которые обеспечивают соответствующее изменение скорости вращения ГЭД.
При движении судна “вперед” и вращении ГЭД “назад” гребной винт выходит на “швартовную” характеристику нагрузки. На этой характеристике гребной винт работает ориентировочно с удвоенной нагрузкой по вращающему моменту (по сравнению с винтовой характеристикой). Перегрузкам ГЭД по моменту соответствуют перегрузки по току. В системе регулирования СЭД имеется ограничение по току нагрузки ГЭД, которое ограничивает заданную частоту вращения при возникновении перегрузок. Вследствие этого ограничения при реверсе ГЭД выходит не на заданную отрицательную частоту вращения, а на меньшую частоту.
На рис.11.2.7 представлена диаграмма напряжений, токов и электромагнитного момента ГЭД в номинальном режиме работы СЭД.
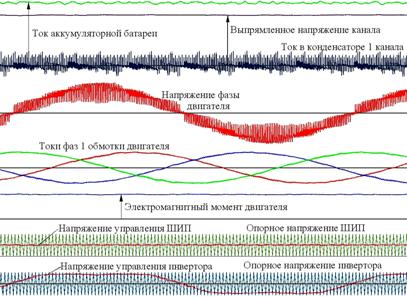
Рис.11.2.7 Напряжения и токи АИН и ГЭД
Индукторные электрические машины представляют собой известный класс электромеханических преобразователей. Работа этих машин основана на создании в магнитопроводе постоянного магнитного потока, на изменении этого потока с помощью вращающегося зубчатого индуктора и на использовании пульсаций потока для наведения ЭДС в неподвижной обмотке статора. Для создания ЭДС используется только переменная составляющая магнитного поля. Постоянная составляющая является “паразитной”, однако она необходима для создания переменной составляющей. Указанный принцип действия индукторных машин обуславливает низкое использование магнитопровода. По этой причине индукторные машины находили ограниченное применение. В основном они использовались в системах с повышенной частотой тока.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.