Полученные на выходе регуляторов тока напряжения управления поступают в блоки БС1-БС4 сравнения с пилообразными опорными напряжениями, на выходе которых формируются импульсы управления транзисторами. Каждый блок формирует импульсы управления двумя транзисторами одной подфазы ШИП.
Все пилообразные напряжения имеют одну частоту и синхронизированы.
Пилообразные напряжения блоков управления транзисторами, соединенными с одним уравнительным дросселем, взаимно сдвинуты по фазе на угол π на частоте опорных напряжений.
Пилообразные напряжения блоков управления транзисторами, соединенными с различными уравнительными дросселями одного четырехтактного ШИП, взаимно сдвинуты по фазе на угол π/2 на частоте опорных напряжений.
На рис.11.2.4 представлен результат расчета установившегося режима работы ШИМ при номинальной мощности, напряжении питания 440 В и напряжении на выходе ШИП 900 В.
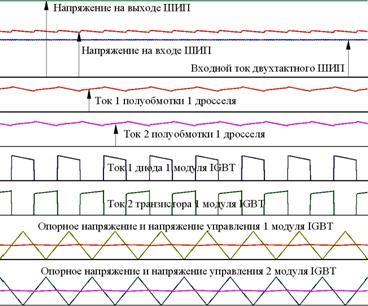
Рис.11.2.4 Напряжения и токи ШИП
Схема АИН одного канала системы регулирования представлена на рис.11.2.5.
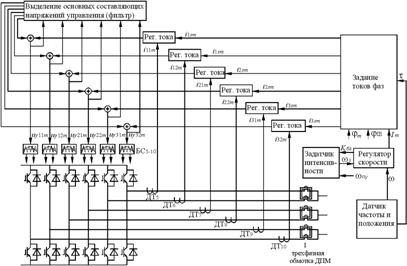
Рис.11.2.5 Схема АИН с системой управления
ГЭД оснащен датчиком положения ротора, который выдает сигналы по частоте вращения ω и по его угловому положению ротора τ (эти величины являются результатом измерений).
Заданная скорость ωз поступает на вход пропорционально-интегрального регулятора скорости. На другой вход этого регулятора поступает сигнал по фактической скорости двигателя ω (от датчика положения ротора ДПР). На выходе регулятора скорости формируется заданная амплитуда токов фаз двигателя Im по следующим формулам:
где Imi – интегральная составляющая амплитуды заданного тока подфазы инвертора, Imaх – максимально допустимая амплитуда тока подфазы инвертора, Imin – минимально допустимая амплитуда тока подфазы инвертора, Kωi, Kωo – коэффициенты обратных связей регулятора по интегралу отклонения частоты и по отклонению.
При известном угле сдвига φm данной трехфазной обмотки относительно первой обмотки двигателя, заданном угле φIE сдвига вектора токов фаз относительно вектора ЭДС, заданные мгновенные значения токов подфаз АИН определяются следующими формулами:
Заданные токи подфаз inзm поступают на входы пропорциональных регуляторов тока, которые имеются в каждой фазе каждого моста инверторов. На выходе этих регуляторов формируются мгновенные значения напряжений управления по следующим формулам:
![]()
где Kio – коэффициент по отклонению тока от заданного значения.
Напряжения управления инверторов находятся как суммы
пропорциональных (токовых) ![]() и интегральных
(сетевых)
и интегральных
(сетевых) ![]() составляющих
составляющих
![]()
Интегральные составляющие напряжений управления определяются
в результате фильтрации трехфазных систем напряжений управления инверторов и
выделения “гладких” составляющих. При этом определяются амплитуда ![]() , частота
, частота ![]() и
фаза
и
фаза ![]() “гладких” составляющих напряжений управления:
“гладких” составляющих напряжений управления:
где Δt – шаг работы системы управления, uy1jm, uy2jm, uy3jm – мгновенные значения трех напряжений управления одного инвертора, e1, e2, e3, A, B, C, D – промежуточные переменные, Kωi, Kωo – коэффициенты обратных связей регулятора по интегралу отклонения частоты и по отклонению.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.