Другая возможность построения мощных частотно-регулируемых электроприводов – применение многотактных полупроводниковых преобразователей. В многотактных преобразователях используются параллельное соединение транзисторов мостов или транзисторных модулей через дроссели. Дроссели могут быть индивидуальными или магнитосвязанными. Токи в параллельно включенных полупроводниковых устройствах делятся поровну с помощью устройств управления.
На рис.7.4.1 изображена схема электропривода с многотактным трехфазным инвертором ИН, в которой несколько транзисторных однотактных инверторов (в данном случае два инвертора), питающихся от общего источника постоянного напряжения, включены параллельно через фазные дроссели Lдр и питают общую нагрузку – асинхронный двигатель АД. К двигателю подключен также фильтр высших гармоник напряжения, который содержит трехфазную конденсаторную батарею с емкостями фаз Cf и активными сопротивлениями Rcf.
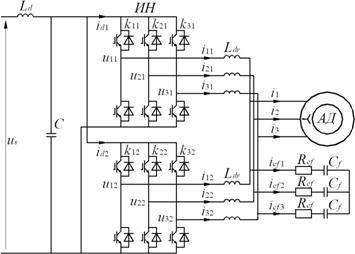
Рис.7.4.1 Схема электропривода с асинхронным двигателем и многотактным инвертором
Если в схеме рис.7.4.1 инверторы управляются синфазно (импульсы управления одноименными транзисторами совпадают по фазе), то два параллельно включенные инвертора эквивалентны одному инвертору увеличенной мощности. Электроприводы с одномостовыми (однотактными) транзисторными инверторами рассмотрены выше.
Многотактные инверторы отличаются тем, что для каждого параллельно включенного моста в системе управления формируется индивидуальное опорное (пилообразное) напряжение. При этом опорные напряжения сдвигаются по фазе на угол, равный отношению 2p на частоте ШИМ к количеству параллельно включенных мостов Jm
![]() . (7.4.1)
. (7.4.1)
На рис.7.4.2 изображены опорные напряжения uоп1 и uоп2 двухмостового или двухтактного инвертора, в электроприводе, схема которого изображена на рис.7.4.1.
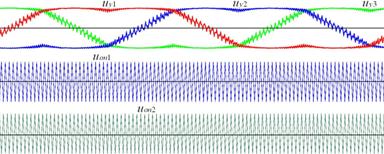
Рис.7.4.2 Опорные напряжения и напряжения управления двухтактного инвертора
В одном из вариантов системы управления импульсы управления транзисторами многотактного инвертора формируются путем сравнения трехфазной системы напряжений управления uyn (n =1, 2, 3) с опорными напряжениями рис.7.4.2, как и в одномостовом инверторе. В этом варианте на систему управления не возлагается задача равномерного распределения токов между параллельно включенными мостами. Токи распределяются между мостами пассивными элементами – активными и индуктивными сопротивлениями параллельно работающих устройств.
В другом варианте системы управления для каждого моста формируется трехфазная система напряжений управления uynm (n =1, 2, 3, m = 1,..Jm). Напряжения управления формируются в функции токов мостов и этим обеспечивается равномерное распределение токов между параллельно включенными мостами.
Распределение токов между параллельно включенными полупроводниковыми приборами, в первую очередь, зависит от падений напряжения на транзисторных модулях. Поставщики модулей в каталогах на приборы дают обычно разброс падений напряжения при протекании прямого номинального тока в пределах 20 %. Эта величина может оказаться больше в случае различных условий охлаждения модулей, то есть при различиях в их температурах.
Более надежным средством распределения токов между полупроводниковыми приборами является использование дросселей.
В одном из вариантов в каждой фазе каждого моста используется индивидуальный дроссель. В этом варианте массогабаритные характеристики дросселей сравнительно большие. При этом несколько ухудшаются характеристики асинхронного двигателя – индуктивности дросселей увеличивают индуктивности рассеяния статора двигателя и в соответствии с формулами (2.4.6) и (2.4.7) уменьшаются критический момент и перегрузочная способность.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.