Если при приложении нагрузки ΔM скорость Δω уменьшается незначительно, то характеристика считается жесткой, при значительном изменении скорости характеристику называют мягкой.
На рис.2.3.4 изображены естественные механические характеристики основных типов двигателей вращательного движения:
1 – механическая характеристика двигателя постоянного тока независимого возбуждения (высокая постоянная жесткость);
2 – механическая характеристика двигателя постоянного тока последовательного возбуждения (характеристика мягкая);
3 – механическая характеристика асинхронного двигателя (жесткость переменная);
4 – механическая характеристика синхронного двигателя (абсолютно жесткая характеристика).
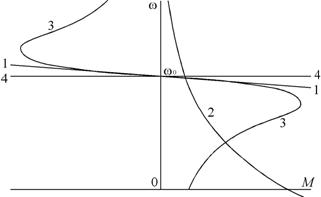
Рис.2.3.4 Естественные механические характеристики двигателей
Характеристики рис.2.3.4 соответствуют номинальному режиму работы двигателей, типовой схеме включения при отсутствии в цепях питания двигателей дополнительных элементов. Такие характеристики называют естественными.
Искусственные (регулировочные) механические характеристики образуются, когда в цепях питания двигателей изменяются напряжение, частота, используются дополнительные элементы, например, резисторы, токоограничивающие реакторы, полупроводниковые преобразователи.
К механической системе, совершающей вращательное движение, прикладываются два момента: момент M, развиваемый двигателем (во многих случаях его называют электромагнитным моментом Mэм), и момент сопротивления движению Mc (рис.2.3.5). При постоянной или равной 0 скорости вращения вала указанные моменты равны M=Mc. Это соответствует первому закону механики Ньютона – закону инерции, который применительно к вращательному движению может быть сформулирован следующим образом: тело, имеющее фиксированную ось вращения, будет находиться в состоянии покоя или равномерного вращения до тех пор, пока приложенные моменты не выведут его из этого состояния:
![]() , (2.3.4)
, (2.3.4)
то есть, если алгебраическая сумма моментов, прикладываемых к валу, равна 0, то механическая система будет вращаться с постоянной скоростью (или будет в состоянии покоя).
![]()
Рис.2.3.5 Моменты, прикладываемые к механической системе с одной фиксированной осью вращения
Для поступательного движения условие установившегося режима формулируется как
![]() , (2.3.5)
, (2.3.5)
Момент сопротивления движению называют статическим моментом, так как он характеризует установившийся режим работы электропривода.
Момент двигателя и статический момент зависят от скорости. Если известны механические характеристики двигателя и нагрузки, то скорость установившегося режима можно найти графически, как изображено на рис.2.3.6: рабочая точка A является точкой пересечения механических характеристик двигателя и нагрузки.
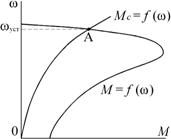
Рис.2.3.6 Графическое определение скорости электропривода
Статические моменты разделяются на активные и реактивные.
Mca – активный момент сопротивления создается силами тяжести (например, в подъемных устройствах), силами ветра (механизмы поворота башенных кранов) и т. д. Активные моменты могут препятствовать или способствовать движению, соответственно знак момента может быть положительным или отрицательным.
Mcр – реактивный момент сопротивления движению возникает как реакция на движение (например, момент сопротивления вентилятора, момент трения). Реактивные моменты препятствуют движению, знак момента отрицательный.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.