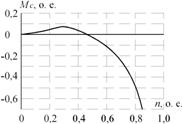
Рис.2.2.4 Момент сопротивления на валу газотурбогенератора
Если вал двигателя жестко соединен с валом нагрузки и между ними отсутствуют механические преобразователи, то моменты инерции двигателя Jд и нагрузки Jс (с учетом вала) суммируются и образуют единый момент инерции вращающихся масс
![]() . (2.2.3)
. (2.2.3)
Во многих случаях электроприводы обеспечивают линейное движение нагрузки. Например, тяговые приводы электропоездов.
При движении поезда со скоростью v в воздушной среде в первом приближении сила сопротивления Fс в относительных единицах пропорциональна квадрату скорости
![]() . (2.2.4)
. (2.2.4)
Мощность нагрузки в относительных единицах при линейном движении
![]() . (2.2.5)
. (2.2.5)
Зависимости (2.2.4) и (2.2.5) при линейном движении аналогичны вентиляторной характеристике (2.2.1) и зависимости (2.2.2) при вращательном движении. При проектировании электроприводов во многих случаях характеристики нагрузки при линейном движении приводятся к валу двигателя, то есть преобразуются в характеристики вращательного движения. При этом осуществляется также преобразование линейно движущихся масс в моменты инерции вращающихся масс.
В некоторых случаях указанное преобразование не является однозначным и зависит от ряда факторов. Например, в тяговых приводах электропоездов преобразование вращающего момента двигателя Mэм в силу F, движущую поезд, осуществляется в результате сцепления рельса и колеса, как изображено на рис.2.2.5.
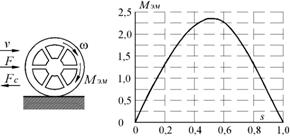
Рис.2.2.5 Зависимость вращающего момента от скольжения при сцеплении колеса с рельсом
При наличии вращающего момента колесо движется по рельсу со скольжением s. При этом линейная скорость движения поезда v определяется угловой частотой вращения колеса ω, его радиусом R и скольжением
![]() . (2.2.6)
. (2.2.6)
В нормальных режимах работы системы при увеличении электромагнитного момента привода скольжение увеличивается. При этом для расчетов тягового электропривода движущиеся линейно массы поезда приводятся к моменту инерции вращающихся масс привода. Однако при некоторых значениях скольжения возможности передачи усилий через контакт рельса и колеса снижаются и сцепление может быть потеряно. В этом случае резко уменьшается инерционность вращающихся масс, резко увеличивается их ускорение и может быть утеряна способность системы к возвращению к нормальному режиму работы. Вследствие указанного к быстродействию тяговых приводов электропоездов, особенно высокоскоростных электропоездов предъявляются весьма высокие требования.
Электроприводы рудоразмольных мельниц, как правило, имеют весьма не стабильную нагрузку на валу. Мельницы могут быть заполнены рудой или не заполнены, руда может быть в различном состоянии и при повороте мельницы, создавать различный момент сопротивления, что пояснено на рис.2.2.6. При этом момент сопротивления нагрузки может быть переменным и его мгновенные значения могут превышать номинальный момент электропривода, как изображено на рис.2.2.6.
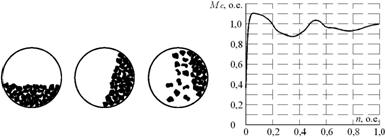
Рис.2.2.6 Перемещение руды при повороте мельницы и момент сопротивления на валу
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.