Через
время
![]() напряжения
с этих конденсаторов поочередно снимаются разрядными щетками и подаются на
конденсатор
напряжения
с этих конденсаторов поочередно снимаются разрядными щетками и подаются на
конденсатор ![]() , включённый в цепь обратной связи
выходного решающего усилителя.
, включённый в цепь обратной связи
выходного решающего усилителя.
Таким
образом, через время ![]() на
выходе блока воспроизводится ступенчатая аппроксимация входного напряжения (см.
рис. 3.2).
на
выходе блока воспроизводится ступенчатая аппроксимация входного напряжения (см.
рис. 3.2).
Требуемые
значения времени запаздывания ![]() обеспечиваются
выбором частоты импульсов
обеспечиваются
выбором частоты импульсов ![]() и
числа шагов смещения n зарядных щеток
относительно разрядных.
и
числа шагов смещения n зарядных щеток
относительно разрядных.
Оценим
ошибки в воспроизведении времени запаздывания и амплитуды. Очевидно, ошибка в
воспроизведении времени запаздывании не может превышать величину ![]() , поэтому можно считать, что фазовая
частотная характеристика воспроизводится принципиально точно. Ошибка в
воспроизведении амплитуды складывается из двух составляющих:
, поэтому можно считать, что фазовая
частотная характеристика воспроизводится принципиально точно. Ошибка в
воспроизведении амплитуды складывается из двух составляющих:
1)
Ошибки вследствие того, что запоминается не непрерывное напряжение ![]() , а его ступенчатая аппроксимация.
Очевидно, что эта ошибка не может превышать величины
, а его ступенчатая аппроксимация.
Очевидно, что эта ошибка не может превышать величины
![]() (3.5)
(3.5)
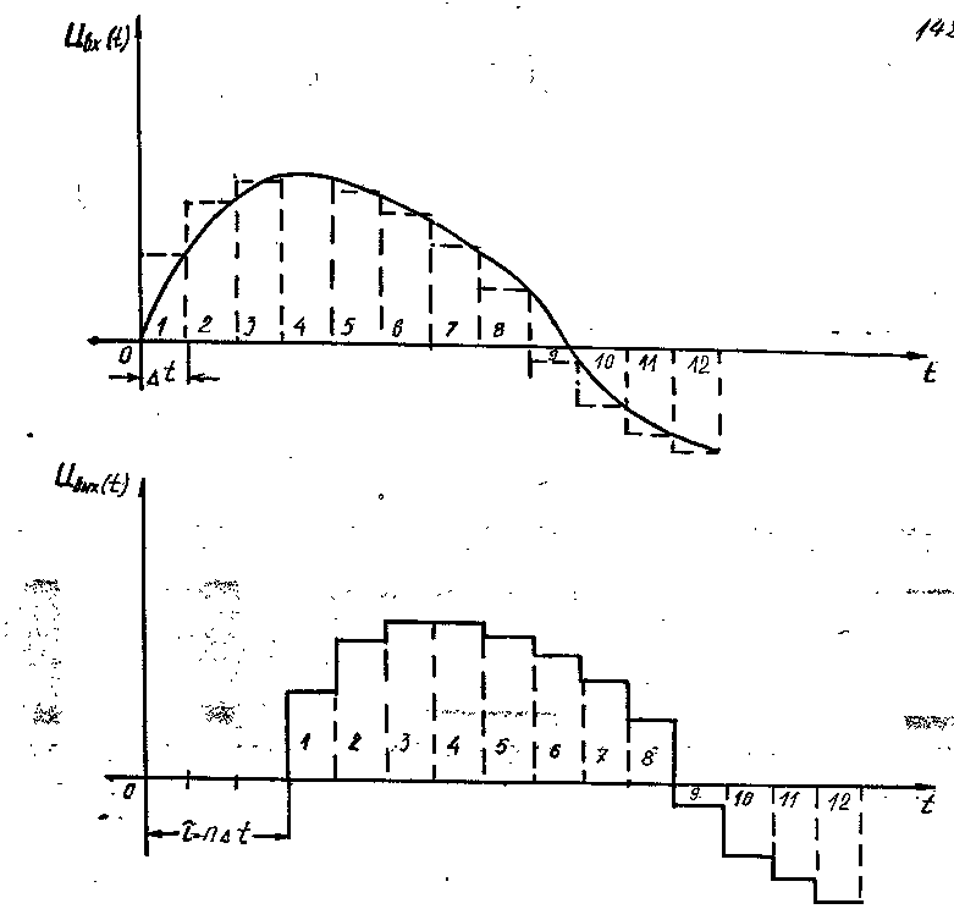
Рис. 3.2.
2)
Ошибки вследствие того, что напряжения передаются с конденсаторов ![]() на выход блока неточно.
на выход блока неточно.
Оценим
эту ошибку. Пусть разрядные щётки соединили конденсатор ![]() с
конденсатором
с
конденсатором ![]() .
.
До
соединения количество электричества на конденсаторе
![]()
![]() ,
,
количество
электричества на конденсаторе ![]()
![]() ,
,
общее количество электричества
![]() .
.
После соединения это количество электричества
![]()
Следовательно,
и ошибка

т.е.
 (3.6)
(3.6)
Для
уменьшения ошибки ![]() величину
величину
![]() берут значительно меньшей по
сравнению с величиной
берут значительно меньшей по
сравнению с величиной ![]() .
.
Для
уменьшения ошибки ![]() блок постоянного
запаздывания с запоминающими конденсаторами обычно строится по схеме,
изображенной на рис. 3.3.
блок постоянного
запаздывания с запоминающими конденсаторами обычно строится по схеме,
изображенной на рис. 3.3.
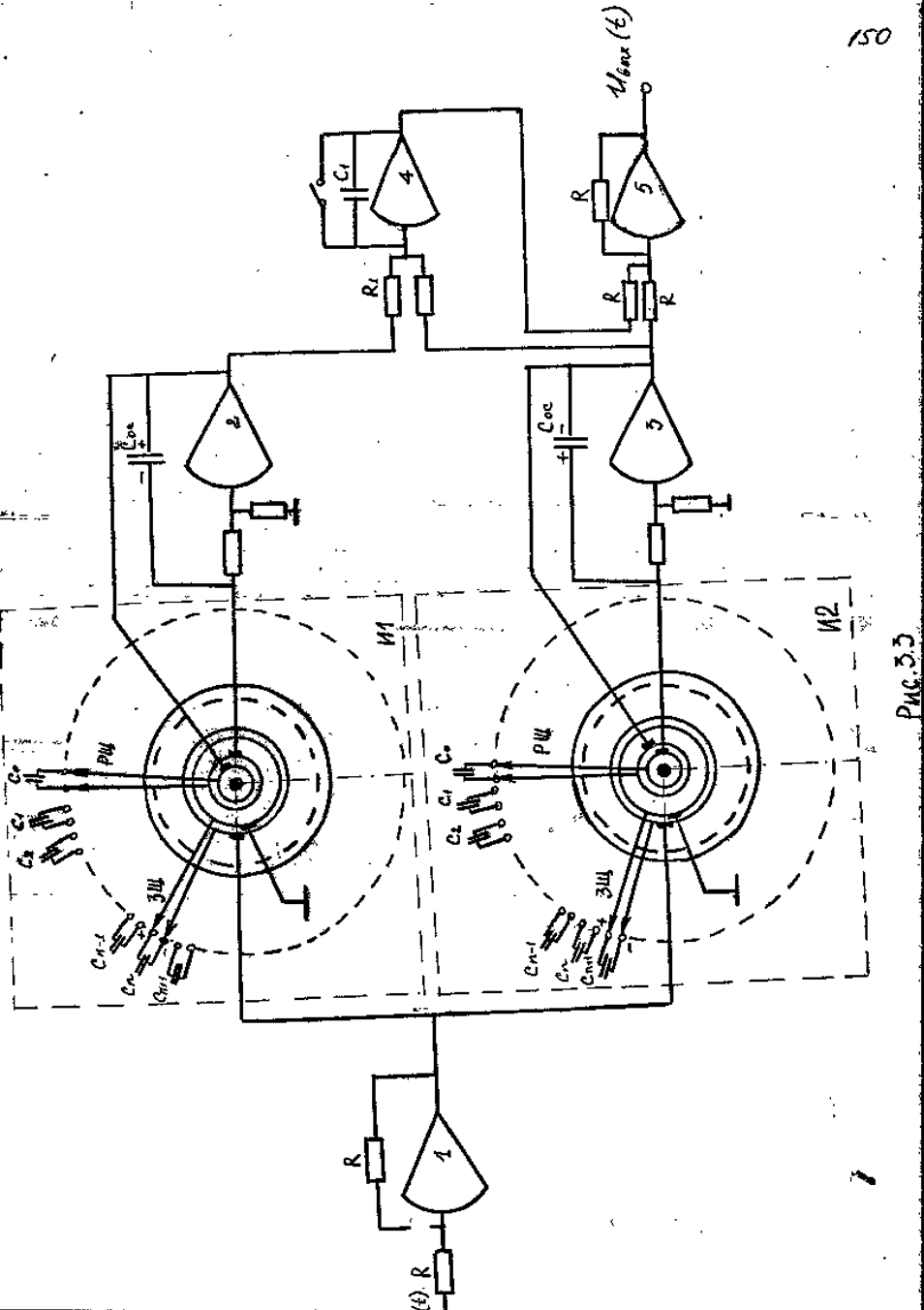
Блок
содержит два шаговых искателя ![]() и
и ![]() . Зарядные щетки искателя
. Зарядные щетки искателя
![]() смещаются на "n"
шагов, а зарядные щетки искателя
смещаются на "n"
шагов, а зарядные щетки искателя ![]() на
"n+1" шагов относительно разрядных. На выходе
решающего усилителя 2 через время
на
"n+1" шагов относительно разрядных. На выходе
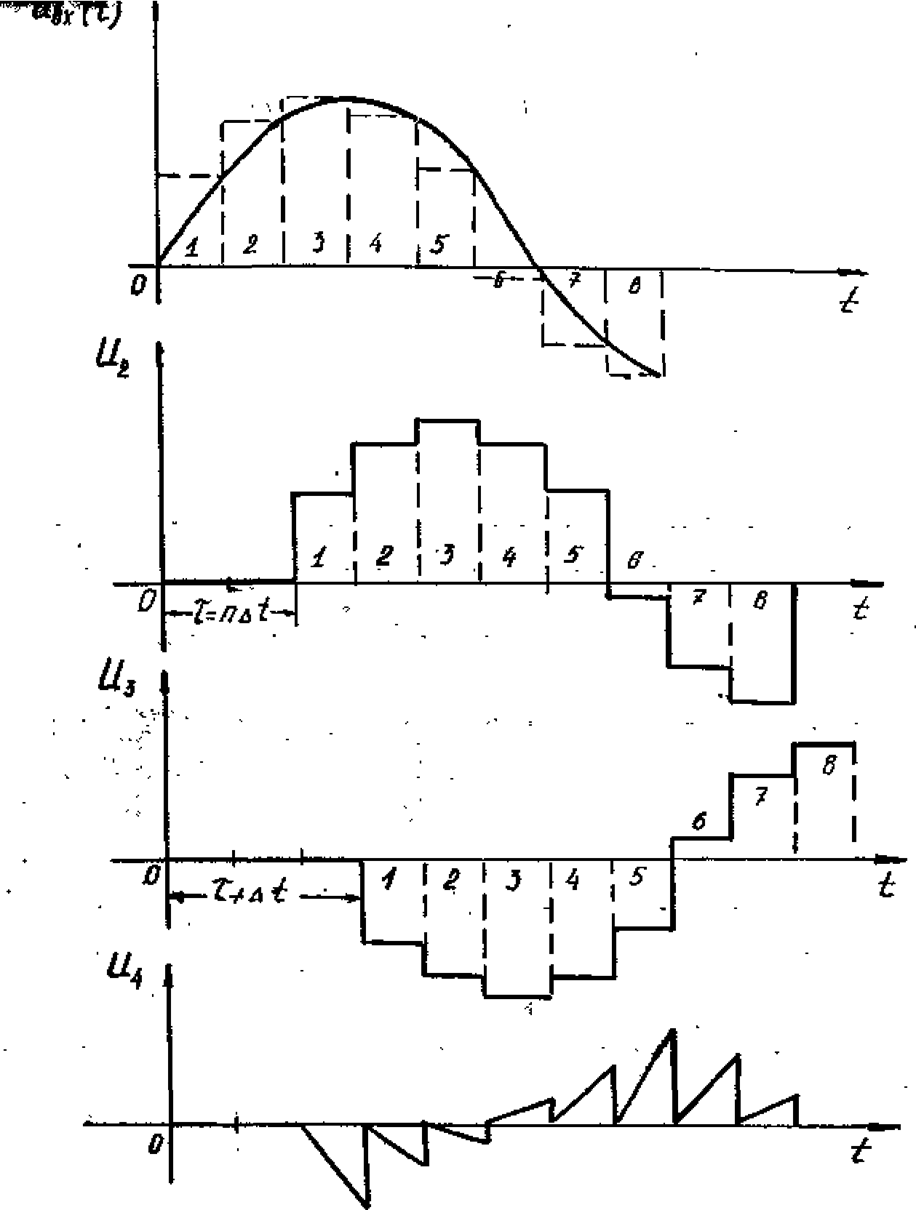
решающего усилителя 2 через время ![]() воспроизводится
ступенчатая аппроксимация входного напряжения, а на выходе решающего усилителя
3 через время
воспроизводится
ступенчатая аппроксимация входного напряжения, а на выходе решающего усилителя
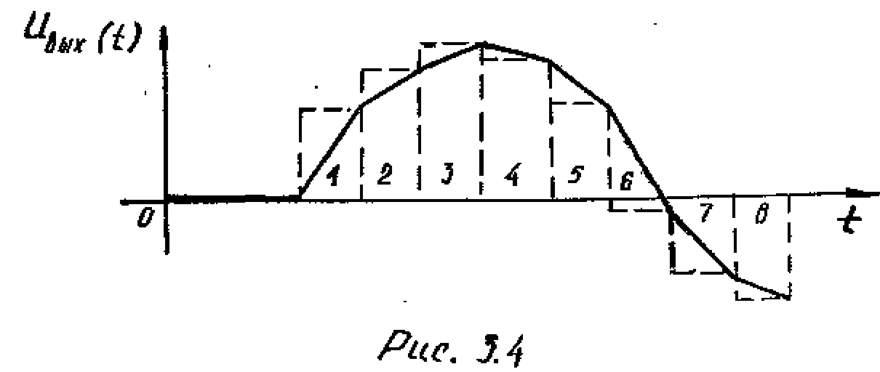
3 через время ![]() воспроизводится
ступенчатая аппроксимация выходного напряжения с противоположным знаком (см.
рис. 3.4). Таким образом, напряжения на выходах решающих усилителей 2 и 3 в каждый
момент времени противоположны по знаку, а по абсолютной величине отличаются на
величину приращения входного напряжения за время
воспроизводится
ступенчатая аппроксимация выходного напряжения с противоположным знаком (см.
рис. 3.4). Таким образом, напряжения на выходах решающих усилителей 2 и 3 в каждый
момент времени противоположны по знаку, а по абсолютной величине отличаются на
величину приращения входного напряжения за время ![]() .
Эти напряжения поступают на входы интегрирующего усилителя 4. Величина
.
Эти напряжения поступают на входы интегрирующего усилителя 4. Величина ![]() устанавливается равной
устанавливается равной ![]() , поэтому приращение напряжения на
выходе усилителя 4 за время
, поэтому приращение напряжения на
выходе усилителя 4 за время ![]()

В
конце каждого промежутка времени ![]() накопленный на
усилителе 4 заряд сбрасывается.
накопленный на
усилителе 4 заряд сбрасывается.
Напряжение, получаемое на выходе интегрирующего усилителя 4, складывается с выходным напряжением решающего усилителя 3 с помощью суммирующего усилителя 5.
Таким
образом, через время ![]() на выходе блока
воспроизводится кусочно-линейная аппроксимация входного напряжения (см. рис.
3.9).
на выходе блока
воспроизводится кусочно-линейная аппроксимация входного напряжения (см. рис.
3.9).
3.4. Блок временного запаздывания с магнитной лентой.
Принципиальная схема блока постоянного запаздывания с магнитной лентой изображена на рис. 3.5
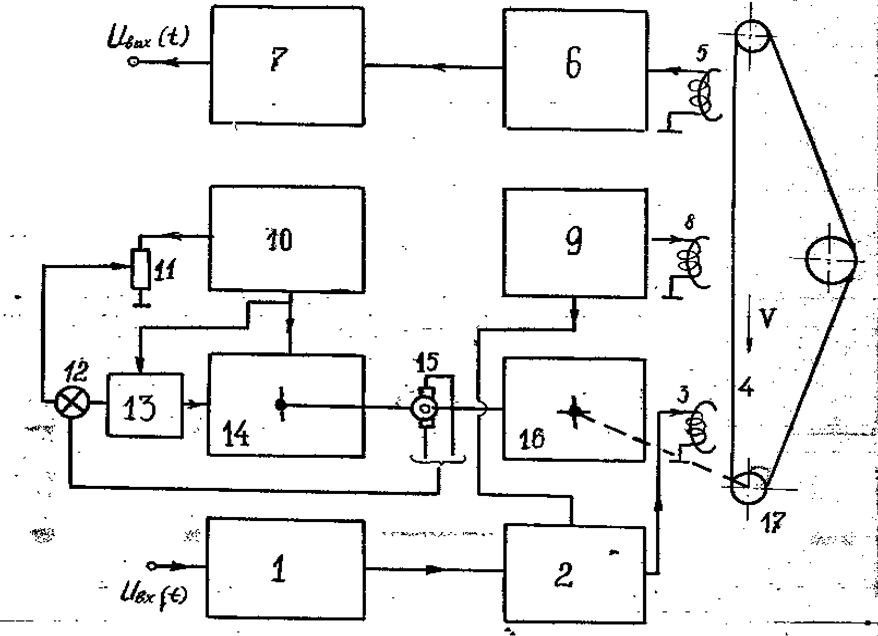
Рис 3.5
Входной
сигнал ![]() , изменяющийся с низкой частотой,
модулируется на частоте генераторам 1 .
Напряжение с генератора поступает через усилитель мощности 2 на головку записи
3. Записанный на магнитную ленту 4 сигнал, пройдя через специальное устройство
типа "бесконечной кассеты", через время
, изменяющийся с низкой частотой,
модулируется на частоте генераторам 1 .
Напряжение с генератора поступает через усилитель мощности 2 на головку записи
3. Записанный на магнитную ленту 4 сигнал, пройдя через специальное устройство
типа "бесконечной кассеты", через время  наводит
в головке воспроизведения напряжение, которое поступает на вход
усилителя-ограничителя 6. Здесь L
- путь, проходимый лентой 4 от головки записи 3 до головки воспроизведения 5.
На выходе усилителя-ограничителя получается изменяющееся по частоте напряжение
прямоугольной формы, амплитуда которого строго калибрована и не зависит от
величины электродвижущей силы, наведенной в головке воспроизведения. Подученные
прямоугольные импульсы проходят через счётчик импульсов 7. На его выходе
образуется напряжение, пропорциональное числу импульсов в единицу времени, т.е.
частоте записанного напряжения или величине входного сигнала. Записанный сигнал
стирается головкой стирания 8, питающейся от генератора высокой частоты 9.
наводит
в головке воспроизведения напряжение, которое поступает на вход
усилителя-ограничителя 6. Здесь L
- путь, проходимый лентой 4 от головки записи 3 до головки воспроизведения 5.
На выходе усилителя-ограничителя получается изменяющееся по частоте напряжение
прямоугольной формы, амплитуда которого строго калибрована и не зависит от
величины электродвижущей силы, наведенной в головке воспроизведения. Подученные
прямоугольные импульсы проходят через счётчик импульсов 7. На его выходе
образуется напряжение, пропорциональное числу импульсов в единицу времени, т.е.
частоте записанного напряжения или величине входного сигнала. Записанный сигнал
стирается головкой стирания 8, питающейся от генератора высокой частоты 9.
Требуемые
значения времени запаздывания ![]() обеспечиваются
выбором скорости движения ленты V.
обеспечиваются
выбором скорости движения ленты V.
Установленная скорость поддерживается системой автоматического регулирования, состоящей из стабилизированного блока питания 10, потенциометра установки скорости 11, суммирующего элемента 12, усилителя 13, мотора 14 и тахогенератора 15. Мотор 14 через редуктор 16 приводит в движение ведущий валик 17.
Лекция № 22
План лекции
1. Этапы подготовки уравнений к решению на АВМ.
2.Уравнения преобразования исходных переменных в машинные переменные.
3. Выбор масштабов преобразования переменных.
Глава IV. МЕТОДИКА ПОДГОТОВКИ УРАВНЕНИЙ К РЕШЕНИЮ НА АВМ
Подготовка заданных уравнений к решению на АВМ включает:
1) преобразование исходных переменных в машинные переменные и выбор масштабов преобразования;
2) получение системы машинных уравнений;
3) составление структурной схемы модели;
4) определение коэффициентов передачи решающих элементов, входящих в модель;
5) определение возмущений и начальных условий в напряжениях.
4.1. Преобразование исходных переменных в машинные переменные и выбор масштабов преобразования.
Исходные переменные преобразуются в машинные переменные по уравнениям
![]() (4.1)
(4.1)
![]() (4.2)
(4.2)
где t - независимая исходная переменная;
![]() - масштаб преобразования независимой
исходной переменной;
- масштаб преобразования независимой
исходной переменной;
![]() - независимая машинная переменная –
машинное время;
- независимая машинная переменная –
машинное время;
![]() - i-ая
зависимая исходная переменная;
- i-ая
зависимая исходная переменная;
![]() - масштаб преобразования i-той
зависимой исходной переменной;
- масштаб преобразования i-той
зависимой исходной переменной;
![]() - зависимая машинная переменная -
напряжение.
- зависимая машинная переменная -
напряжение.
Если
заданные уравнения имеют операторную форму, то исходный оператор  преобразуется в машинный оператор
преобразуется в машинный оператор  по уравнению
по уравнению
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.