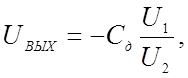
На рис. 2.14 изображена схема деления напряжения U1 на положительное напряжение U2.
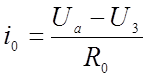
Токи i1 и i2, определяются выражениями
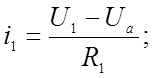
Согласно уравнению (1.2)
![]()
 (б)
(б)
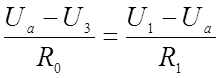
Согласно уравнению (2.24)
U3=CyU2UВЫХ
Подставляя выражение U3 в уравнение (б) и полагая US = 0, имеем
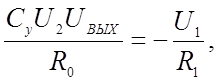
откуда
 (2.24)
(2.24)
где
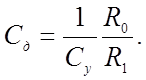 (2.25)
(2.25)
Уравнение (2.24) можно записать в виде
UВЫХ=K1U1,
где
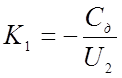
и может рассматриваться как переменный коэффициент усиления решающего усилителя.
Если U2>0, то K1<0 и обратная связь будет отрицательной. Схема деления в этом случае будет устойчивой. Если U2<0, то K1>0 и
обратная связь будет положительной. Схема деления в этом случае будет неустойчивой.
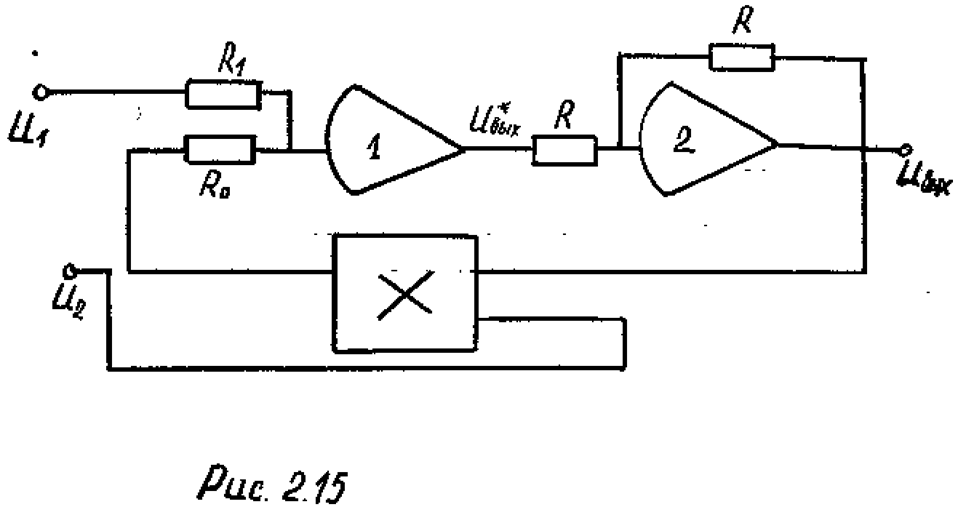
На рис. 2.1-5 изображена схема деления напряжения на отрицательное напряжение U2.
Очевидно, что напряжение UВЫХ по прежнему определяется уравнением (2.24).
Так как UВЫХ=-U*ВЫХ, то
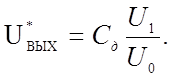 (2.26)
(2.26)
Уравнение (2.26) можно запасать в виде
U*ВЫХ=K2U1
где
и может рассматриваться как переменный коэффициент усиления решающего усилителя №1.
Если U2<0, то K2<0, обратная связь будет отрицательной. Схема деления в этом случае будет устойчивой. Если U2>0, то K2>0и обратная связь будет положительной. Схема деления в этом случае будет неустойчивой.
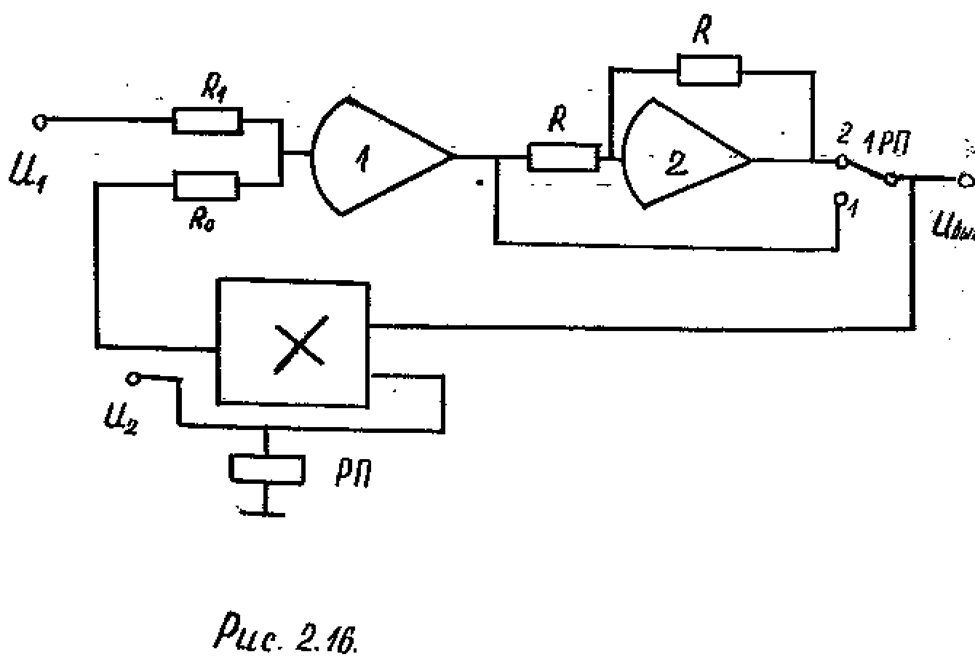
На рис. 2.16 изображена схема деления напряжения U1 на знакопеременное напряжение U2.
Схема содержит поляризованное реле РП, выполняющее функцию автоматически переключающего устройства. На обмотку реле подается напряжение U2. При U2>0 контакт занимает положение I и схема совпадает со схемой деления на положительное напряжение. При U2<0 контакт 1РП занимает положение 2 и схема совпадает со схемой деления на отрицательное напряжение. При значениях U2 близких к нулю контакт 1РП занимает нейтральное положение и UВЫХ=0.
Лекция №15
1. Схема электромеханических блоков (ЭМБ).
2. Выполнение операции умножения с помощью ЭМБ.
3. Выполнение операции деления с помощью ЭМБ.
4. Воспроизведение с помощью ЭМБ функциональных зависимостей.
2.6. Электромеханические блоки.
Электромеханическими блоками комплектуются средние и большие аналоговые машины для выполнения нелинейных преобразований сигналов. Их основные достоинства состоят в высокой статической точности и стабильности результатов при выполнении функционального преобразования или операции умножения - деления переменных. Существенный недостаток электромеханических устройств состоит в использовании контактных устройств и ограничении скорости изменения сигналов, преобразуемых в механическое перемещение.
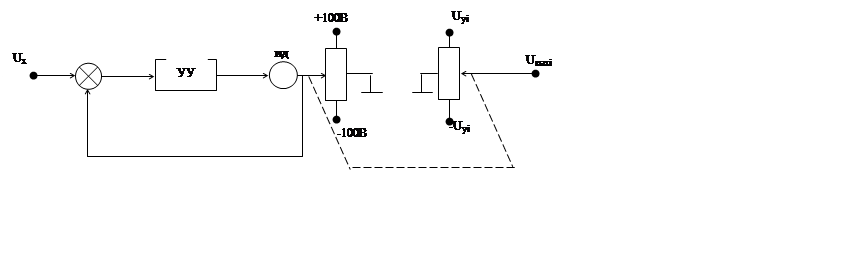 Основным узлом
электромеханического блока является следящая система, преобразующая входной
электрический сигнал в механическое перемещение (вращательное или поступательное).
Нагрузкой следящей системы являются один или несколько потенциометров. Схема
выполнения операции умножения с помощью электромеханического блока показана на
рис. 2.17. Следящая система состоит из исполнительного двигателя (ИД),
усилительного устройства (УУ) и потенциометра обратной связи ( ПОС
). Для того, чтобы напряжение, снимаемое с потенциометра, могло изменяться в
пределах заданного диапазона напряжений, например ±100
В, его средняя нулевая точка соединяется с общим
Основным узлом
электромеханического блока является следящая система, преобразующая входной
электрический сигнал в механическое перемещение (вращательное или поступательное).
Нагрузкой следящей системы являются один или несколько потенциометров. Схема
выполнения операции умножения с помощью электромеханического блока показана на
рис. 2.17. Следящая система состоит из исполнительного двигателя (ИД),
усилительного устройства (УУ) и потенциометра обратной связи ( ПОС
). Для того, чтобы напряжение, снимаемое с потенциометра, могло изменяться в
пределах заданного диапазона напряжений, например ±100
В, его средняя нулевая точка соединяется с общим
Рис. 2.17
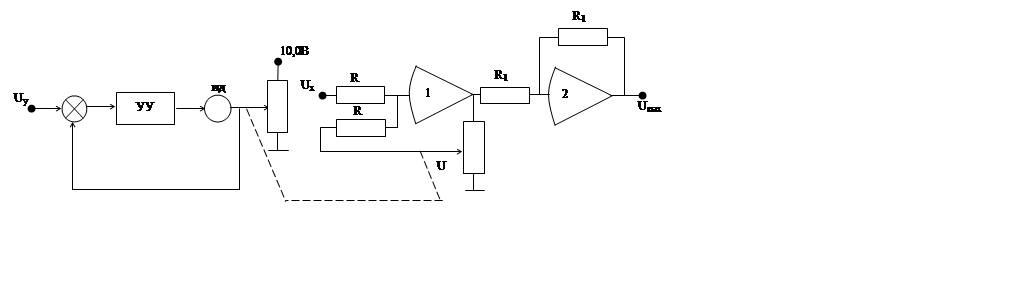 |
Рис. 2.18
проводом ("землей" схемы), а к концам потенциометра подводятся напряжения + 100 В и - 100 В относительно общего провода. Следящая система обеспечивает преобразование входного сигнала UX в угол поворота j выходного вала, т.е. j=K1UX , где K1 - масштабный коэффициент.
Выходной вал следящей системы, на котором установлен потенциометр, механически связан с движками потенциометров (на схеме показан лишь один потенциометр Пi ).
Каждый потенциометр также имеет среднюю нулевую точку. На выводы потенциометров подаются напряжения +Uyi и -Uyi, соответствующие сомножителю Uyi. Напряжение, снимаемое с движка потенциометра, UВЫХ=aiUyi, где ai - коэффициент передачи потенциометра, который пропорционален углу поворота выходного вала следящей системы. ai = K2j, где K2 - коэффициент передачи между валом следящей системы и движком потенциометра.
Таким образом, сомножители связаны с выходным сигналом соотношением UВЫХ = KUxUyi, где K=K1K2 - масштабный коэффициент.
В множительных блоках при изменении сигнала ±100 В масштабный коэффициент равен 0,01 (при ± 10 В равен 0,1).
При выполнении операции деления с помощью электромеханического блока используется схема, показанная на рис. 2.18. Здесь следящая система преобразует в угол поворота напряжение сигнала делителя Uy. Потенциометр, установленный на выходном валу следящей системы, включен в цепь обратной связи операционного усилителя I. Схема выполнения операции деления аналогична схеме рас.2.14.
В суммирующей точке усилителя I происходит уравновешивание токов входной цепи и цепи обратной связи, т.е.
(U - напряжение, снимаемое с потенциометра), U=-aUВЫХ, где a- коэффициент передачи потенциометра, пропорциональный углу поворота движка a = K2j. Движок потенциометра приводится в движение следящей системой, преобразующей сигнал Uy в угол поворота j=K1Uy. Таким образом, Ux =K1K2UyUВЫХ, откуда
где K=1/(K1K2)
При использовании электромеханических блоков для умножения и деления переменные частотные ограничения накладываются только на сигнал, преобразуемый в угол поворота. Другая переменная не имеет дополнительных частотных ограничений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.