![]() .
.
Тогда
 ,
, ![]() . (2)
. (2)
Относительно погрешностей ![]() сделаем следующие допущения:
сделаем следующие допущения:
1) погрешности ![]() являются нормально распределенными
случайными величинами с нулевым математическим ожиданием
являются нормально распределенными
случайными величинами с нулевым математическим ожиданием ![]() и дисперсиями
и дисперсиями  , причем
, причем ![]() известны,
а параметр
известны,
а параметр ![]() подлежит оцениванию вместе с
искомыми параметрами
подлежит оцениванию вместе с
искомыми параметрами ![]()
![]() ,
то есть измерения
,
то есть измерения ![]() неравноточные;
неравноточные;
2) погрешности отдельных
измерений независимы. Из (2) следует, что величины ![]() будут
иметь нормальное распределение с параметрами
будут
иметь нормальное распределение с параметрами
 ,
,  . (3)
. (3)
Естественно, что при решении
системы (1) вместо величин ![]() придется
использовать наблюдаемые значения
придется
использовать наблюдаемые значения ![]() , причем число
наблюдений, как правило, делают большим числа неизвестных
, причем число
наблюдений, как правило, делают большим числа неизвестных ![]() . В этом случае система (2) не имеет
решения, поэтому оценки неизвестных параметров
. В этом случае система (2) не имеет
решения, поэтому оценки неизвестных параметров ![]() получают
по методу максимального правдоподобия (ММП) или по методу наименьших квадратов
(МНК). С учетом (3) функция правдоподобия выборки
получают
по методу максимального правдоподобия (ММП) или по методу наименьших квадратов
(МНК). С учетом (3) функция правдоподобия выборки ![]() будет
будет
 . (4)
. (4)
Видно, что при всяком
значении ![]() максимум функции правдоподобия (4)
достигается при выборе
максимум функции правдоподобия (4)
достигается при выборе ![]() таком, что
таком, что
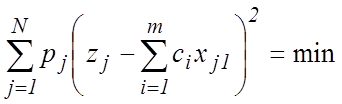 , (5)
, (5)
то есть при выборе ![]() по предписанию
МНК, который является частным случаем ММП, если выборка
по предписанию
МНК, который является частным случаем ММП, если выборка ![]() имеет
нормальное распределение. Для нахождения минимума (5) найдем
имеет
нормальное распределение. Для нахождения минимума (5) найдем ![]() ее частных производных по
ее частных производных по ![]() и приравняем их нулю. В результате
имеем систему из
и приравняем их нулю. В результате
имеем систему из ![]() нормальных уравнений
относительно
нормальных уравнений
относительно ![]() неизвестных параметров
неизвестных параметров ![]()
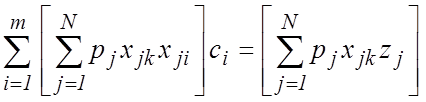
![]() , (6)
, (6)
решая которую, получают искомые оценки.
Однако более наглядно система (6) и ее решение могут быть
представлены в матричном виде. Обозначим ![]() ,
,
![]() – соответственно векторы истинных
значений и наблюдаемых значений измеряемых величин;
– соответственно векторы истинных
значений и наблюдаемых значений измеряемых величин;
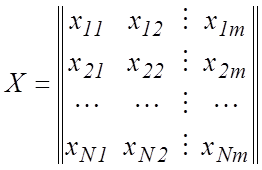 ,
, 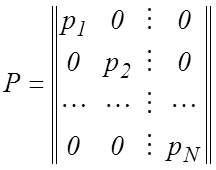
соответственно матрица плана эксперимента, состоящая из известных
величин ![]() , и диагональная матрица весов
измерений;
, и диагональная матрица весов
измерений; ![]() – вектор неизвестных параметров.
– вектор неизвестных параметров.
В данных обозначениях система нормальных уравнений (6) примет вид
![]() , (7)
, (7)
а вектор оценок неизвестных параметров находится из выражения
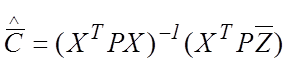 , (8)
, (8)
где ![]() и
и ![]() –
обозначают соответственно операции транспонирования и нахождения обратной
матрицы. Полученные оценки
–
обозначают соответственно операции транспонирования и нахождения обратной
матрицы. Полученные оценки  являются
состоятельными, несмещенными и эффективными [1].
являются
состоятельными, несмещенными и эффективными [1].
Используя те же экспериментальные данные, можно найти
оценку дисперсии случайной погрешности ![]() .
Для этого продифференцируем логарифм функции правдоподобия (4) по
.
Для этого продифференцируем логарифм функции правдоподобия (4) по ![]() и приравняем производную нулю, тогда
и приравняем производную нулю, тогда
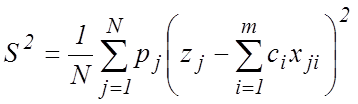 ,
,
где в последнее выражение вместо неизвестных параметров ![]() подставлены их оценки максимального
правдоподобия (8). Легко показать, что полученная оценка дисперсии является
смещенной [1], а для нахождения несмещенной оценки необходимо ввести
поправочный множитель
подставлены их оценки максимального
правдоподобия (8). Легко показать, что полученная оценка дисперсии является
смещенной [1], а для нахождения несмещенной оценки необходимо ввести
поправочный множитель
 . (9)
. (9)
Зная оценку параметра ![]() ,
можно судить о точности оценки коэффициентов
,
можно судить о точности оценки коэффициентов ![]() .
Но погрешности оценивания данных коэффициентов уже не независимы, поэтому они
описываются дисперсионной матрицей ошибок, равной
.
Но погрешности оценивания данных коэффициентов уже не независимы, поэтому они
описываются дисперсионной матрицей ошибок, равной
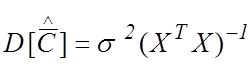 . (10)
. (10)
Легко видеть, что  является
квадратной, симметричной матрицей
является
квадратной, симметричной матрицей ![]() ; в диагонали ее
стоят дисперсии соответствующих неизвестных параметров
; в диагонали ее
стоят дисперсии соответствующих неизвестных параметров ![]() ,
а в недиагональные элементы определяют ковариации соответствующих им параметров
,
а в недиагональные элементы определяют ковариации соответствующих им параметров
![]() .
.
Основываясь на результатах обработки линейной модели, перейдем к рассмотрению нелинейного случая.
Для решения нелинейной задачи осуществляют искусственную
линеаризацию системы нелинейных уравнений. Пусть задана система нелинейных
уравнений относительно неизвестных параметров ![]() ,
подлежащих оцениванию:
,
подлежащих оцениванию:
![]()
![]() .
.
При этом предполагается, что существует некоторое нулевое
приближение ![]() (начальные оценки) неизвестных
параметров
(начальные оценки) неизвестных
параметров ![]() , причем погрешность его мала, то есть
разности
, причем погрешность его мала, то есть
разности ![]() малы по сравнению с истинными
значениями оцениваемых коэффициентов
малы по сравнению с истинными
значениями оцениваемых коэффициентов ![]()
![]() . Не рассматривая способа
получения начального приближения
. Не рассматривая способа
получения начального приближения ![]() , т.к. в каждом
конкретном случае это является самостоятельной задачей, остановимся на
процедуре уточнения данного приближения. Про погрешности
, т.к. в каждом
конкретном случае это является самостоятельной задачей, остановимся на
процедуре уточнения данного приближения. Про погрешности ![]() сделаем те же самые предположения,
что и в линейном случае.
сделаем те же самые предположения,
что и в линейном случае.
Ввиду малости погрешностей
разложим функции ![]()
![]() в
ряд Тейлора в точке
в
ряд Тейлора в точке ![]() , ограничившись линейными
членами:
, ограничившись линейными
членами:
 (11)
(11)
В системе (11) сначала
находятся частные производные ![]() по
по ![]() , а затем вычисляются значения этих
частных производных в точке
, а затем вычисляются значения этих
частных производных в точке ![]() . Получилась
система из
. Получилась
система из ![]() линейных относительно поправок
линейных относительно поправок ![]() уравнений с
уравнений с ![]() неизвестными,
аналогичная системе (2). Решая ее по методике, описанной в предыдущем разделе,
находят неизвестные поправки
неизвестными,
аналогичная системе (2). Решая ее по методике, описанной в предыдущем разделе,
находят неизвестные поправки ![]() и вычисляют
первые приближения оценок
и вычисляют
первые приближения оценок ![]() . Данную
процедуру можно повторить и найти второе приближение оценок
. Данную
процедуру можно повторить и найти второе приближение оценок ![]() , разложив функции
, разложив функции ![]() в ряд Тейлора в точке
в ряд Тейлора в точке ![]() и решив получающуюся систему,
аналогичную (11), относительно поправок
и решив получающуюся систему,
аналогичную (11), относительно поправок ![]() ,
и т.д. То есть в данном случае оценки неизвестных коэффициентов
,
и т.д. То есть в данном случае оценки неизвестных коэффициентов ![]() находятся методом последовательных
приближений. Но для успешной сходимости метода необходимо удачно находить
нулевые приближения
находятся методом последовательных
приближений. Но для успешной сходимости метода необходимо удачно находить
нулевые приближения ![]() , что
зачастую является очень сложной задачей.
, что
зачастую является очень сложной задачей.
Постановка задачи аналогична
разделу 1, где погрешности ![]() измерения величин
измерения величин
![]() предполагаются независимыми,
нормально распределенными с нулевым математическим ожиданием и одинаковой дисперсией
предполагаются независимыми,
нормально распределенными с нулевым математическим ожиданием и одинаковой дисперсией
![]() для всех
для всех ![]() ;
то есть измерения равноточные. В этом случае матрица весов измерений
;
то есть измерения равноточные. В этом случае матрица весов измерений ![]() становится единичной, и выражения
для вектора оценок коэффициентов
становится единичной, и выражения
для вектора оценок коэффициентов ![]() (8), оценки
дисперсии
(8), оценки
дисперсии ![]() (9) и матрицы ошибок (10) несколько упрощаются:
(9) и матрицы ошибок (10) несколько упрощаются:
 , (12)
, (12)
 , (13)
, (13)
 . (14)
. (14)
При этом все оптимальные свойства оценок (12) сохраняются.
Очень часто одна физическая
величина ![]() линейно зависит от другой величины
линейно зависит от другой величины ![]() (приведите примеры!)
(приведите примеры!)
![]()
где неизвестные коэффициенты ![]() и
и ![]() находят
из эксперимента. Для этого при фиксированных точно известных значениях
находят
из эксперимента. Для этого при фиксированных точно известных значениях ![]() :
: ![]() измеряют соответствующие значения
измеряют соответствующие значения ![]() , но поскольку в
измерениях присутствуют неизбежные ошибки
, но поскольку в
измерениях присутствуют неизбежные ошибки
![]() ,
то реально результаты измерения получаются
,
то реально результаты измерения получаются
![]() ,
где измеренные величины
,
где измеренные величины ![]() можно представить
в виде
можно представить
в виде
![]() . (15)
. (15)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.