21.10.2005г
На вертикальном участке траектории при 0![]() t
t![]() t1 интегрируется
первое и третье уравнения системы (5). На этом участке
t1 интегрируется
первое и третье уравнения системы (5). На этом участке  ,
поэтому второе уравнение не рассматривается. На участке t1
,
поэтому второе уравнение не рассматривается. На участке t1![]() t
t![]() t3 угол атаки
t3 угол атаки ![]() задаётся в соответствии с зависимостью (4),
интегрируются совместно первое, второе и третье уравнения. В результате
находится
задаётся в соответствии с зависимостью (4),
интегрируются совместно первое, второе и третье уравнения. В результате
находится ![]() .
. ![]() определяется
по формуле (4). После определения
определяется
по формуле (4). После определения ![]()
![]() =
=![]() (t)+
(t)+ ![]() , находим программный угол тангажа
совместным интегрированием первого, второго и третьего уравнений системы (5).
, находим программный угол тангажа
совместным интегрированием первого, второго и третьего уравнений системы (5).
После момента t3 для t![]() t3 ,
угол тангажа на участке [t3 tk]
равен
t3 ,
угол тангажа на участке [t3 tk]
равен ![]() .
. ![]() -
задаётся. Зависимость
-
задаётся. Зависимость ![]() используется как статическое
соотношение для определения угла атаки
используется как статическое
соотношение для определения угла атаки ![]() , где
, где ![]() также обычно задаётся заранее, исходя из
необходимости получения максимальной или заданной дальности.
также обычно задаётся заранее, исходя из
необходимости получения максимальной или заданной дальности.
 ;
;
![]() >0, а значение
>0, а значение ![]() или
или ![]() определяется
из расчёта пассивного участка траектории БР с использованием результатов
эллиптической теории.
определяется
из расчёта пассивного участка траектории БР с использованием результатов
эллиптической теории.
После нахождения всех переменных и программных
значений из четвёртого уравнения найдём![]() -
продольную координату.
-
продольную координату.  .
.
В литературе приводится следующая зависимость, хорошо аппроксимирующая результаты описанного выше алгоритма нахождения программы.
 ;
;
 - относительное время полёта на
криволинейном участке;
- относительное время полёта на
криволинейном участке;
0![]()
![]()
![]() 1 .
1 .
На рис.3 показан характер программной траектории одноступенчатой БР на активном участке.
На этом же рисунке показано взаимное расположение оси х1 и вектора скорости центра масс v.
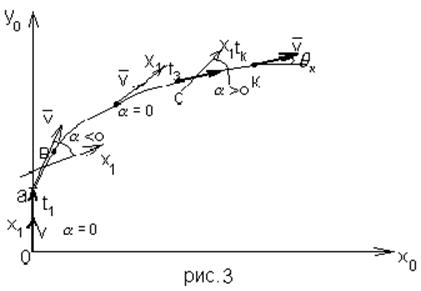
Как видно из рис.3, программная траектория одноступенчатой БР на активном участке состоит из следующих участков:
1) вертикальный
участок оа: ![]() =0,
=0, ![]() =
=![]() ;
;
2) участок
«завала» ав: ![]() <0,
<0, ![]() ;
;
3) участок
разворота вс: ![]() =0,
=0, ![]() ;
;
4) участок
«наведения» ск: ![]() >0,
>0, ![]() ;
;
Первые три участка лежат в плотных слоях атмосферы, где
скоростной напор мал. На этом участке происходит осечка работы двигателя, и
траектория выдерживается близкой к прямолинейной, ориентированной к горизонту
под некоторым заданным или оптимальным углом бросания ![]() .
.
Формируем постановку задачи выбора программы наибольшей дальности.
Задача сводится к трёхпараметрической экстремальной задаче.
Варьируется три параметра: ![]() . Обозначим вектор этих
параметров буквой С(
. Обозначим вектор этих
параметров буквой С(![]() ).
).
Требуется определить компоненты вектора ![]() , при которых реализуется максимум критерия
оптимальности J=L(C), где L - полная дальность полёта
БР.
, при которых реализуется максимум критерия
оптимальности J=L(C), где L - полная дальность полёта
БР.
![]() (6)
(6)
при этом должны выполняться ограничения на нормальные перегрузки, углы атаки, вес и т.д.
В число ограничений может включаться и величина ошибки в дальности полёта в конце траектории.
Ограничение в векторной форме можно записать в виде:
G ![]()
![]() 0
(7)
0
(7)
G ![]() =
=![]()
j - число принимаемых ограничений;
![]() - заданные численные значения
ограничений;
- заданные численные значения
ограничений;
Область выбора параметров вектора ![]() задаётся в виде векторного неравенства а
задаётся в виде векторного неравенства а![]() с
с![]() в
(8), где а и в - m - мерные векторы
предельных значений параметров вектора
в
(8), где а и в - m - мерные векторы
предельных значений параметров вектора ![]() .
.
Таким образом, в такой постановке допускается, что
дальность L и все ограничения могут быть определены при
конкретных значениях вектора![]() .
.
Указанные функции определяются интегрированием системы уравнений БР на активном участке и использованием формулы, определяющей полную дальность полёта: L=xa+Ln, где хa - дальность активного участка;
Ln - дальность пассивного участка;
Для определения дальности Ln существуют приближённые формулы, которые основываются на выводах эллиптической теории.
Для решения поставленной задачи можно использовать численные методы нелинейного математического программирования. В основе этих методов лежит итерационный процесс, который заключается в следующем: вначале, в качестве нулевого приближения , на основании предварительных исследований или статистики, задаются конкретными значениями вектора параметров С=С(0). Далее этот вектор последовательно улучшается с использованием рекуррентного соотношения:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.