В конце траектории активного участка при ![]() угол
угол ![]() должен
быть равен некоторому конечному значению
должен
быть равен некоторому конечному значению ![]() , который
определяется исходя из необходимости обеспечения заданной или максимальной
дальности полёта. При этом на завершающем отрезке активного участка угол
тангажа
, который
определяется исходя из необходимости обеспечения заданной или максимальной
дальности полёта. При этом на завершающем отрезке активного участка угол
тангажа ![]() выдерживается постоянным или близким к
постоянному, а также обеспечивается прямолинейный участок траектории под углом
возвышения
выдерживается постоянным или близким к
постоянному, а также обеспечивается прямолинейный участок траектории под углом
возвышения ![]() , величина которого вместе с конечной
скоростью
, величина которого вместе с конечной
скоростью ![]() определяет требуемую или максимальную
дальность полёта. Выключение двигателя на прямолинейном участке траектории
уменьшает влияние возмущений, связанных с остановкой двигателя на отклонение
двигателя на расчётной траектории. Далее выдвигаются требования, чтобы
нормальная перегрузка находилась в заданных пределах на всём активном участке.
определяет требуемую или максимальную
дальность полёта. Выключение двигателя на прямолинейном участке траектории
уменьшает влияние возмущений, связанных с остановкой двигателя на отклонение
двигателя на расчётной траектории. Далее выдвигаются требования, чтобы
нормальная перегрузка находилась в заданных пределах на всём активном участке.
Эти нормальные перегрузки регламентируются условиями
жёсткости конструкции и прочности ракеты. Определяющее влияние ![]() имеет угол атаки
имеет угол атаки ![]() .
Поэтому для уменьшения
.
Поэтому для уменьшения ![]() необходимо стремиться к
программе с возможно меньшими углами атаки
необходимо стремиться к
программе с возможно меньшими углами атаки ![]() ,
особенно на тех участках траектории, где скоростной напор
,
особенно на тех участках траектории, где скоростной напор  имеет существенное значение.
имеет существенное значение.
![]()
Участки траектории с большими скоростными напорами q необходимо проходить с нулевыми или
минимальными углами атаки ![]() . На участках
траектории, где скоростной напор мал (ближе к концу активного участка) угол
. На участках
траектории, где скоростной напор мал (ближе к концу активного участка) угол ![]() может быть увеличен. Вид зависимости
может быть увеличен. Вид зависимости ![]() и
и ![]() должен
учитывать также эффективность работы органов управления. В области
трансзвуковых скоростей
должен
учитывать также эффективность работы органов управления. В области
трансзвуковых скоростей ![]() происходит резкое
увеличение коэффициентов
происходит резкое
увеличение коэффициентов ![]() и
и ![]() , что отрицательно сказывается на работе
СУ.
, что отрицательно сказывается на работе
СУ.
( )
)
Контур управления рассчитан на определённое значение этих
параметров и их резкое изменение может привести к ухудшению качества процесса
управления угловым движением. Чтобы избежать этого отрицательного влияния,
можно изменять параметры контура управления, т.е. адаптировать контур
управления к изменяющимся условиям полёта (адаптивный автопилот). Использование
адаптивного автопилота усложняет структуру СУ. Для уменьшения влияния этих
резких изменений ![]() и
и ![]() необходимо,
чтобы БР проходила указанную область чисел М с нулевыми или близкими к нулю
необходимо,
чтобы БР проходила указанную область чисел М с нулевыми или близкими к нулю ![]() . Отмеченным условиям хорошо удовлетворяет
следующая программа изменения угла атаки
. Отмеченным условиям хорошо удовлетворяет
следующая программа изменения угла атаки ![]() при
движении в плотных слоях атмосферы.
при
движении в плотных слоях атмосферы.
![]() (4)
(4)
где ![]() - предельное значение угла
- предельное значение угла ![]() на дозвуковом участке траектории, а
на дозвуковом участке траектории, а ![]() - время от точки старта до конца
вертикального участка полёта (продолжительность вертикального участка), а –
постоянный коэффициент, обычно подбираемый для данного класса ракет так, чтобы
при достижении
- время от точки старта до конца
вертикального участка полёта (продолжительность вертикального участка), а –
постоянный коэффициент, обычно подбираемый для данного класса ракет так, чтобы
при достижении ![]() получить угол
получить угол ![]() . Время, при котором достигаются эти
значения маха, обозначим
. Время, при котором достигаются эти
значения маха, обозначим ![]() . Параметры
. Параметры ![]() и
и ![]() могут
варьироваться при выборе оптимальной программы. Траектория наиболее
чувствительна к величине
могут
варьироваться при выборе оптимальной программы. Траектория наиболее
чувствительна к величине ![]() . Зависимость (4) задаёт
. Зависимость (4) задаёт
![]() в виде кривой, которая быстро достигает
своего максимума (по абсолютной величине), а затем убывает: сначала быстро, а
по мере увеличения времени t –
медленнее, стремясь к нулю при
в виде кривой, которая быстро достигает
своего максимума (по абсолютной величине), а затем убывает: сначала быстро, а
по мере увеличения времени t –
медленнее, стремясь к нулю при ![]() . Типичные графики
. Типичные графики ![]() и
и ![]() для
активного участка траектории одноступенчатой БР при вертикальном старте
представлены на рисунке 2.
для
активного участка траектории одноступенчатой БР при вертикальном старте
представлены на рисунке 2.
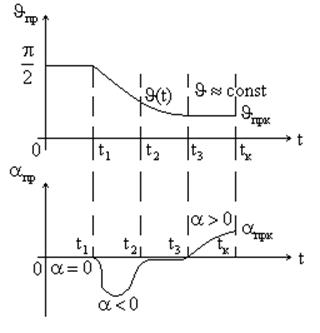
Рисунок 2
Таким образом, траектория БР на активном участке может быть разбита на 3 участка:
1) 
2) ![]()
![]() -
плавная зависимость, изменяется от
-
плавная зависимость, изменяется от ![]() до
до ![]() , соответствующего данной дальности полёта L, причём на этом участке угол
, соответствующего данной дальности полёта L, причём на этом участке угол ![]() изменяется
в соответствии с зависимостью (4). Время
изменяется
в соответствии с зависимостью (4). Время ![]() характеризует
момент достижения чисел
характеризует
момент достижения чисел ![]() .
.
3) ![]() - это участок движения БР в
относительно разряжённых слоях атмосферы при небольших значениях скоростного
напора , когда можно принять
- это участок движения БР в
относительно разряжённых слоях атмосферы при небольших значениях скоростного
напора , когда можно принять ![]() . Необходимый для обеспечения программы
движения
. Необходимый для обеспечения программы
движения ![]() .
.
Порядок выбора
зависимости ![]() и порядок расчёта программной
траектории.
и порядок расчёта программной
траектории.
При расчётах программной траектории и выбора программы угла тангажа используется система уравнений (5):
При этом ![]() считаются известными,
считаются известными, ![]() . Четвёртое уравнение, определяющее закон
изменения продольной координаты
. Четвёртое уравнение, определяющее закон
изменения продольной координаты ![]() при выборе программной
зависимости не используется, т.к. координата
при выборе программной
зависимости не используется, т.к. координата ![]() не
входит в остальные уравнения системы (5). Задача решается численным
интегрированием по участкам траектории.
не
входит в остальные уравнения системы (5). Задача решается численным
интегрированием по участкам траектории.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.