
i - номер итерации;
![]()


![]()
![]() ; к=0,1,2,…
; к=0,1,2,…
R![]() ;
;
![]()
![]() ;
;
Метод Рунге - Кутта.
В методе Рунге-Кутта истинная интегральная кривая заменяется параболой того или иного вида. Метод Рунге-Кутта основан на формуле парабол Симпсона. Формула Симпсона определяет интеграл:

Алгоритм метода Рунге-Кутта(для одного дифференциального уравнения, записанного в нормальной форме Коши):
![]() +к;
+к;
к=
![]()
R![]()
Рассмотрим алгоритм метода Рунге-Кутта для системы дифференциальных уравнений п - го порядка.
Имеется система дифференциальных уравнений, записанных в нормальной форме Коши:
h - шаг интегрирования;
 (1)
(1)
![]() (2)
(2)
|
х |
y1 |
y2 |
... |
Yn |
|
|
х0 |
yn0 |
||||
|
х1 |
|||||
|
х2 |
|||||
|
х3 |
|||||
|
. |
|||||
|
. |
|||||
|
. |
|||||
|
xk+1=xk+h |
|||||
![]() +к
+к![]() ;
;
 , где
, где
![]()

1-ый индекс - номер функции;
2-ой индекс - номер ![]() ;
;

![]()
Задача: Рассмотрим случай, когда система состоит из двух уравнений:
 при
t=0
при
t=0 
h=![]() t=0.2
t=0.2

![]()
![]()
![]() =h[
=h[![]() ]
]
![]() =h[
=h[![]() ]
]
 , так
как
, так
как ![]()
![]()
![]()
Расчёт траектории неуправляемых реактивных снарядов ближнего действия.
При расчёте траектории неуправляемых реактивных снарядов, принимается за материальную точку переменной массы, которая совпадает с центром масс. Это эквивалентно допущению, что вращательное движение относительно центра масс не влияет на движение центра масс. Такая траектория является идеальной.
Расчёт активного участка траектории:
Рассматривается движение вертикальной плоскости - плоскости
стрельбы. Поле силы тяжести принимается постоянным параллельным. Тяга R принимается постоянной и не зависящей от высоты полёта.
Угол атаки ![]() ,
, ![]() . Раз
. Раз![]() , значит подъёмная сила
, значит подъёмная сила ![]()
 , причём
, причём ![]() , так
как
, так
как![]() .
.
Сила тяги определяется по формуле R=uQ, где u=Pуд*g - скорость истечения продуктов сгорания.
Pуд=280-320 [сек]
G=mg;
Векторное уравнение движения точки:
 , где
, где ![]() -
радиус- вектор центра масс относительно начальной точки;
-
радиус- вектор центра масс относительно начальной точки;
![]() , где i
=const- коэффициент формы;
, где i
=const- коэффициент формы;
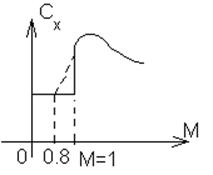
![]() - закон сопротивления;
- закон сопротивления;
В баллистике рассматривают следующие законы сопротивления:
1) закон Сиаччи;
2) закон 1930г (Гарнье);
3) закон 1943г (снаряд морской артиллерии «Куард»);
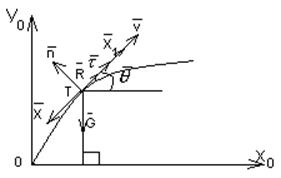
Рассмотрим уравнение для расчёта траектории. Воспользуемся векторным соотношением.
![]() - орт касательной;
- орт касательной;
![]() - орт нормали; х1 - ось ЛА.
- орт нормали; х1 - ось ЛА.
16.09.05 *
1) ![]()
2) ![]() - оси сопровождающего
трёхгранника
- оси сопровождающего
трёхгранника
![]() - угол наклона траектории (угол
возвышения)
- угол наклона траектории (угол
возвышения)
Точка 0 – точка схода ЛА с направляющих
![]()
![]()
![]()
Начальные условия:
(3) При t=0 
![]() - скорость
схода с направляющих
- скорость
схода с направляющих
![]() - угол наклона направляющих
пусковой установки
- угол наклона направляющих
пусковой установки
Можно использовать ![]() :
:
![]()
![]()
(3’) При t=0 ![]()
![]() - переменные системы (2’)
- переменные системы (2’)
Основной метод решения системы (2) или (2’) – численное интегрирование. Наряду с методом численного интегрирования в данном случае при расчёте активного участка может быть использован приближённый аналитический метод. Этот метод основан на методе последовательных приближений (метод Пикара), известном в теории дифференциальных уравнений. Основная идея метода Пикара заключается в следующем.
Имеется дифференциальное уравнение, записанное в векторной форме
 , где y – вектор, f – заданная
вектор-функция
, где y – вектор, f – заданная
вектор-функция
При ![]()
![]() - номер итерации
- номер итерации
Условия Липшица.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.