С(![]() +1)=С(
+1)=С(![]() )+
)+![]() С(
С(![]() )
(9), где
)
(9), где
![]() =0, 1, 2.. - номер итерации;
=0, 1, 2.. - номер итерации;
![]() С (
С (![]() ) -
вектор поправок, определяемый из условий, чтобы критерий оптимальности
монотонно приближался к экстремальному значению L (
) -
вектор поправок, определяемый из условий, чтобы критерий оптимальности
монотонно приближался к экстремальному значению L (![]() +1)
+1) ![]() L(
L(![]() ), а также выполнялись на каждой
итерации заданные ограничения (7) и (8).
), а также выполнялись на каждой
итерации заданные ограничения (7) и (8).
Этот метод поправок ![]() С (
С (![]() ) можно найти методом случайного поиска
или одним из градиентных методов наискорейшего спуска.
) можно найти методом случайного поиска
или одним из градиентных методов наискорейшего спуска.
Приближённая постановка задачи расчёта программной траектории.
Сущность этой постановки основывается на учёте
малости ![]() при полёте по программной траектории,
поэтому вместо программной зависимости
при полёте по программной траектории,
поэтому вместо программной зависимости ![]() используют
зависимость
используют
зависимость ![]() (t). В этом случае
программа может быть представлена зависимостью:
(t). В этом случае
программа может быть представлена зависимостью:
 (10)
(10)
Коэффициенты ![]() определяются
из требований , предъявляемых к программной траектории в различные моменты
времени.
определяются
из требований , предъявляемых к программной траектории в различные моменты
времени.
Предъявим следующие требования:
 (11)
(11)
Отсюда находим ![]() .
.
Для расчёта программной траектории используется следующая система уравнений:
 (12)
(12)
Известны: ![]() .
.

Задача решается численным интегрированием. Помимо этого метода при решении задачи может быть использован приближённый аналитический метод, основанный на методе итераций, как при решении траектории на активном участке (метод Королёва).
28.10.05 *
Особенности программы для двухступенчатых и многоступенчатых ракет.
Для двухступенчатой БР примерная программа изменения угла тангажа для второй ступени имеет следующий вид:
![]() , где
, где
![]() - начальное значение угла тангажа
второй ступени;
- начальное значение угла тангажа
второй ступени;
![]() - время, соответствующее
- время, соответствующее ![]() ;
;
![]() - угловая скорость угла тангажа,
задаётся исходя из конструктивных особенностей ракеты.
- угловая скорость угла тангажа,
задаётся исходя из конструктивных особенностей ракеты.
Очень часто ![]() и
и ![]() не совпадают. В этом случае должен быть
обеспечен плавный и возможно быстрый переход от
не совпадают. В этом случае должен быть
обеспечен плавный и возможно быстрый переход от ![]() до
до ![]() , где
, где ![]() - время
окончания работы первой ступени, соответствующее
- время
окончания работы первой ступени, соответствующее ![]() , при
постепенном переходе к прямолинейному участку траектории, на котором
заканчивается работа второй ступени. Оптимальный угол
, при
постепенном переходе к прямолинейному участку траектории, на котором
заканчивается работа второй ступени. Оптимальный угол ![]() на
прямолинейном участке траектории в конце работы второй ступени обеспечивает
максимальную дальность.
на
прямолинейном участке траектории в конце работы второй ступени обеспечивает
максимальную дальность.
График изменения угла тангажа для двухступенчатой БР можно представить следующим образом:
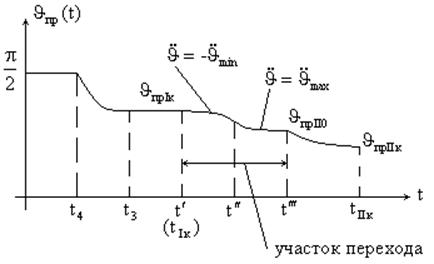
На всех ступенях, начиная со второй ![]() , где
, где ![]() - угол
тангажа, соответствующий началу работы i-ой ступени (i=2,3…). Отступление от этой зависимости приводит лишь к
потере дальности.
- угол
тангажа, соответствующий началу работы i-ой ступени (i=2,3…). Отступление от этой зависимости приводит лишь к
потере дальности.
![]()
![]()
Расчёт пассивного участка траектории БР и ракет-носителей космических аппаратов
Рассмотрим характер баллистической траектории БР от старта до точки падения. Траектория БР соизмерима с размерами Земли:
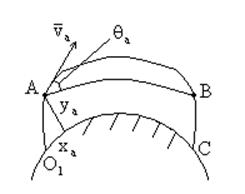
![]() - активный участок
- активный участок
ABC – пассивный участок
АВ – основная часть пассивного участка, расположенная в разряжённых слоях атмосферы
ВС – ветвь ВС расположена в плотных слоях атмосферы (на уровне высоты активного участка).
Исходными данными являются данные конца
активного участка ![]() .
.
Для расчёта основной части пассивного участка, расположенного в разряжённых слоях атмосферы, используются выводы так называемой эллиптической теории. Участок ВС рассчитывается с учётом сопротивления воздуха и кривизны Земли.
Основные допущения эллиптической теории
1. Пренебрегаем сопротивлением атмосферы, а также всеми космическими силами (например, световым давлением). ЛА рассматривается как материальная точка с постоянной массой.
2. Движение точки рассматривается в центральном поле земного тяготения, т.е. в каждой точке траектории сила тяготения направлена к центру Земли, кривизна которой учитывается и зависит от расстояния до этого центра. Величина силы земного тяготения определяется законом всемирного тяготения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.