2) обнуление тяги осуществляется немгновенно, всегда имеет
место импульс последействия тяги. Среднее значение импульса последействия
(математическое ожидание) может быть учтено при составлении расчётного значения
![]() , но разброс этого импульса около среднего
значения (дисперсия) будет вызывать рассеивание по дальности. Если импульс
последействия мал, то и разброс его будет сравнительно небольшим. Для
уменьшения импульса последействия применяют ступенчатое обнуление тяги;
, но разброс этого импульса около среднего
значения (дисперсия) будет вызывать рассеивание по дальности. Если импульс
последействия мал, то и разброс его будет сравнительно небольшим. Для
уменьшения импульса последействия применяют ступенчатое обнуление тяги;
3) остаются ошибки по дальности, вызываемые возмущениями при входе в плотные слои атмосферы. Для их локализации нужно управлять движением ракеты на участке ВС;
4) имеют место инструментальные ошибки измерения параметров, входящих в выражение для Ф. СУ, выключающие двигатель с учётом всех параметров, от которых зависит дальность полёта, получаются весьма сложными. Кроме того, при стрельбе на дальность 300-500 км начинают существенно сказываться атмосферные возмущения на всём пассивном участке.
С точки зрения точности стрельбы, веса СУ и т.д. могут оказаться более приемлемыми СУ, которые выключают двигатель только в зависимости от одного из параметров, определяющих дальность полёта. При этом выбирают тот параметр, отклонение которого от расчётного значения в наибольшей степени сказывается на отклонении по дальности. Таким параметром является скорость ц.м.
Рассмотрим пример:
Пусть БР в конце активного участка имеет следующие
параметры: ![]()
В этом случае поправочные коэффициенты на изменение соответствующего параметра на 1% имеют следующие значения:

Уравнение управления дальностью при выключении двигателя по скорости будет иметь следующий вид:
 (4)
(4)
![]()
При этом программа изменения угла возвышения ![]() задаётся. При реализации управления (4)
нужно на активном участке измерять скорость ц.м. При использовании автономных
методов измерения с помощью интеграторов ускорения для реализации управляющей
функции по истинной скорости ц.м. нужны стабилизированная платформа, два
интегрирующих акселерометра, вычислитель и прогаммное устройство, задающее
задаётся. При реализации управления (4)
нужно на активном участке измерять скорость ц.м. При использовании автономных
методов измерения с помощью интеграторов ускорения для реализации управляющей
функции по истинной скорости ц.м. нужны стабилизированная платформа, два
интегрирующих акселерометра, вычислитель и прогаммное устройство, задающее ![]() . В результате получается достаточно
сложная система, поэтому управляющие функции по истинной скорости не нашли
практического применения. Одной из первых управляющих функций была управляющая
функция по псевдоскорости. Псевдоскоростью или кажущейся скоростью называется
интеграл от псевдоускорения:
. В результате получается достаточно
сложная система, поэтому управляющие функции по истинной скорости не нашли
практического применения. Одной из первых управляющих функций была управляющая
функция по псевдоскорости. Псевдоскоростью или кажущейся скоростью называется
интеграл от псевдоускорения:
![]() ,
, ![]() -
псевдоускорение,
-
псевдоускорение, ![]() - истинное ускорение,
- истинное ускорение, ![]() - ускорение силы тяжести
- ускорение силы тяжести
Псевдоускорение измеряется акселерометром.
Интегрирующий акселерометр позволяет получить интеграл от псевдоускорения относительно оси чувствительности акселерометра.
![]() - ось ракеты
- ось ракеты
![]()
![]() (5)
(5)
Можно показать, что псевдоскорость связана с текущей скоростью в конце активного участка следующим соотношением:
 ,
, ![]() - угол
тангажа
- угол
тангажа
В одной из конструкций интегратора используется
тяжёлый гироскоп (волчок), ц.м. которого не совпадает с ц.м. подвеса. Под
действием силы ![]() , действующей на гироскоп со
стороны ракеты, этот гироскоп прецессирует с угловой скоростью,
пропорциональной проекции этой силы на ось
, действующей на гироскоп со
стороны ракеты, этот гироскоп прецессирует с угловой скоростью,
пропорциональной проекции этой силы на ось ![]() (
(![]() ), измеряемой величиной является угол
прецессии.
), измеряемой величиной является угол
прецессии.
![]()
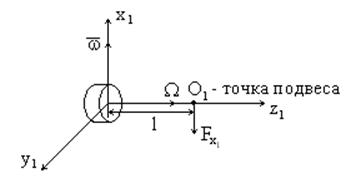
J – момент инерции гироскопа
относительно ![]() (ось гироскопа)
(ось гироскопа)
![]() - угловая скорость прецессии
- угловая скорость прецессии
![]() - угловая скорость вращения
ротора гироскопа
- угловая скорость вращения
ротора гироскопа
![]()
![]() - угол прецессии
- угол прецессии


![]()
Расчёт траектории телеуправляемых и самонаводящихся ЛА
На первых этапах проектирования ЛА и их СУ удобно использовать простейшие методы исследования процессов наведения с целью приближённого определения траектории, потребных нормальных перегрузок и времени полёта. Наиболее простым является метод исследования кинематических траекторий. При реализации этого метода принимаются следующие условия:
1) скорость ЛА является известной функцией времени (в частном случае – постоянной величиной);
2) СУ работает идеально.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.