Наложим на движение ракеты в точке встречи с целью условие:
![]()
 =0
(3)
=0
(3)
Используя уравнение (1), вычислим производную:
![]()
Подставляя условие (3), получим:
![]() , отсюда получаем
, отсюда получаем
 (4)
(4)
Найдём необходимый коэффициент А(t).
Для этого обобщим условие (4), введя в него постоянный коэффициент ![]() , тогда получим:
, тогда получим:
 (5)
(5)
При этом значении коэффициента, уравнение метода спрямления траектории будет иметь вид:
 (6)
(6)
Уравнение (6) - общее уравнение спрямляющих методов.
Если положить m=1, то уравнение
(6) будет представлять собой метод «полного» спрямления. Если m=1/2,
то уравнение (6) будет представлять собой метод «половинного» спрямления. Если m=0, то ![]() , мы получим метод
«накрытия цели».
, мы получим метод
«накрытия цели».
Так как ![]() <0 (расстояние между
ракетой и целью должно убывать), то по абсолютной величине получаем, что
<0 (расстояние между
ракетой и целью должно убывать), то по абсолютной величине получаем, что ![]() . Это означает, что упреждение, при
. Это означает, что упреждение, при ![]() , всегда вводится по направлению движения
цели.
, всегда вводится по направлению движения
цели.
Сравнение методов наведения трёхточечного типа.
Сравнительный анализ будем проводить по двум критериям:
1) по величине норм ускорения на кинематической траектории в
районе встречи ракеты и цели, то есть ![]() =0;
=0;
2) по уравнению, определяющему алгоритм работы устройства выработки команды управления (уравнение сигнала ошибки);
Система телеуправления использует в качестве параметра рассогласования параметр h.
Рассмотрим метод наведения по первому критерию. ![]() - динамическая ошибка наведения, которая
имеет место при отсутствии случайных помех и инструментальных ошибок, только за
счёт маневра цели, которая влияет на
- динамическая ошибка наведения, которая
имеет место при отсутствии случайных помех и инструментальных ошибок, только за
счёт маневра цели, которая влияет на ![]() .
.
 , где
, где ![]() -
коэффициент усиления разомкнутого контура системы телеуправления.
-
коэффициент усиления разомкнутого контура системы телеуправления.
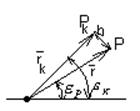
Рассмотрим физический смысл возникновения
динамической ошибки наведения телеуправляемых ракет, использующих в качестве
параметра рассогласования величину ![]() , где r
- приблизительно заданная функция, определяющая расстояние от станции наведения
до ракеты. Кинематическая траектория ракеты в общем случае является
криволинейной, для движения по криволинейной траектории к ракете в каждый
момент времени должна быть приложена нормальная сила, искривляющая траекторию,
которая для крылатых ракет, в основном, является аэродинамической.
, где r
- приблизительно заданная функция, определяющая расстояние от станции наведения
до ракеты. Кинематическая траектория ракеты в общем случае является
криволинейной, для движения по криволинейной траектории к ракете в каждый
момент времени должна быть приложена нормальная сила, искривляющая траекторию,
которая для крылатых ракет, в основном, является аэродинамической.

Угол атаки ![]() , используя
балансировочное соотношение, можно получить следующее соотношение для
, используя
балансировочное соотношение, можно получить следующее соотношение для ![]() :
:
Таким образом, величина управляющей силы искривляющей траектории
пропорциональна углу отклонения рулей ![]() , а
значит и команде управления h.
, а
значит и команде управления h.
Для формирования команды управления необходима ошибка h. Таким образом, ракета может двигаться по криволинейной
траектории только при наличии в каждый момент времени её ошибки, относительно
требуемого положения ракеты. Чем больше кривизна кинематической траектории при
заданном коэффициенте усиления разомкнутого контура управления, тем больше
должно быть значение этой ошибки h. Следовательно,
необходимая величина ![]() , обеспечивающая движение по
заданной кинематической траектории, определяется:
, обеспечивающая движение по
заданной кинематической траектории, определяется:
1)значением![]() ;
;
2)значением ![]() ,
устанавливающего связь между
,
устанавливающего связь между ![]() и h;
и h;
Если бы ![]() обеспечить бесконечно
большим (
обеспечить бесконечно
большим (![]() ), а звенья системы управления были бы
безынерциальными, то при
), а звенья системы управления были бы
безынерциальными, то при ![]() было бы выработано и
выдано на ракету команда, которая способна отклонить рули на требуемый угол
было бы выработано и
выдано на ракету команда, которая способна отклонить рули на требуемый угол ![]() , при этом отклонении рулей возникла бы
управляющая сила
, при этом отклонении рулей возникла бы
управляющая сила ![]() и траектория (действительная)
совпала бы с кинематической. Однако, в действительности,
и траектория (действительная)
совпала бы с кинематической. Однако, в действительности, ![]() . При малом отклонении от кинематической
траектории будет мала и величина команды, подаваемой на ракету (
. При малом отклонении от кинематической
траектории будет мала и величина команды, подаваемой на ракету (![]() ) . Соответствующее отклонение рулей не
создаёт достаточной нормальной силы, обеспечивающей движение ракеты по
кинематической траектории. Ракета будет отходить от кинематической траектории
до тех пор, пока величина h будет такой, что выдаваемая
на ракету команда, прекратит её дальнейшее отклонение от кинематической
траектории. Таким образом, при криволинейной траектории ракеты, вследствие
того, что команда управления формируется на основе h,
ракета будет двигаться не по кинематической, а по так называемой динамической
траектории, смещённой относительно кинематической в сторону её выпуклости.
Линейное отклонение
) . Соответствующее отклонение рулей не
создаёт достаточной нормальной силы, обеспечивающей движение ракеты по
кинематической траектории. Ракета будет отходить от кинематической траектории
до тех пор, пока величина h будет такой, что выдаваемая
на ракету команда, прекратит её дальнейшее отклонение от кинематической
траектории. Таким образом, при криволинейной траектории ракеты, вследствие
того, что команда управления формируется на основе h,
ракета будет двигаться не по кинематической, а по так называемой динамической
траектории, смещённой относительно кинематической в сторону её выпуклости.
Линейное отклонение ![]() между равноудалёнными от пункта
наведения точек кинематической и динамической траектории и называется динамической
ошибкой наведения.
между равноудалёнными от пункта
наведения точек кинематической и динамической траектории и называется динамической
ошибкой наведения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.