Регулирование скорости подачи выполняется за счет регулирования частоты вращения двигателей постоянного тока, имеющим независимое (параллельное) возбуждение [29-33] от постоянных магнитов, которое выполняется изменением напряжения, подводимого к якорю двигателя. Питание двигателей напряжением 40 В обеспечивается от трансформатора и блока ШИП (широтно-импульсного преобразователя) силовой части блока управления станком.
Применяемые для приводов пиноли и револьверной головки асинхронные конденсаторные двигатели (рис.45, 46) со встроенным понижающим редуктором – электрические микромашины переменного тока. Питание асинхронных конденсаторных электродвигателей приводов РГ и пиноли напряжением 127 В производится от специальной обмотки силового трансформатора.
Статор двигателя состоит из двух обмоток. Каждая обмотка имеет 2 пары явно выраженных полюсов. В табл.6 показаны основные характеристики применяемого двигателя. Двигатель имеет фланцевое крепление
Таблица 6
Основные характеристики применяемого двигателя
|
Напря- жение трога-ния,В |
Напряжение питания, В |
Частота вращения,мин-1 при номиналь- ном ходе |
Передаточ- ное отно-шение |
Номи-нальный момент, Н*м |
|
|
обмотки возбужде- ния |
обмотки управле -ния |
||||
|
4,6 |
127 |
127 |
24 72 |
1:45 |
0,16 |
|
1:15 |
0,05 |
||||
(со встроенным редуктором)
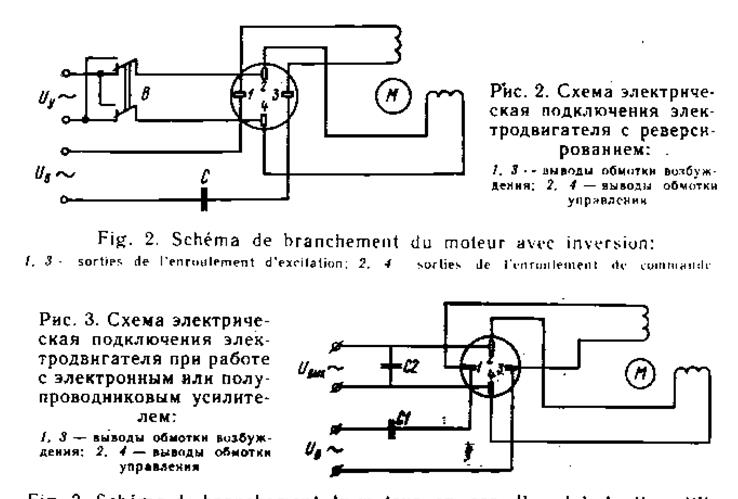
Рис.48. Схема подключения асинхронного конденсаторного двигателя:
1,3 –выводы обмотки возбуждения, 2,4 – выводы обмотки управления
5.2. Структура и схема системы управления
Для станков с ЧПУ применяют систему подчиненного управления (рис. 49) [34-40].

Рис.49. Схема подчиненного управления
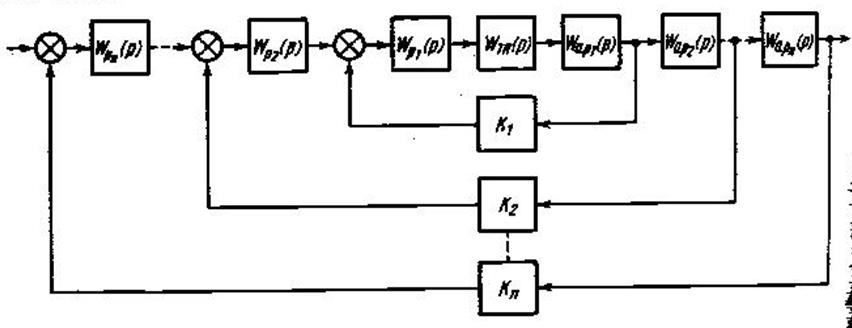
Рис.50.
Примененная для управления станком компьютерная система управления приводами и электроавтоматикой имеет следующие функциональные устройства (рис.50).

Рис. 51. Функциональная схема системы управления станка: ФИ - форми-
рователь импульсов; Р - редуктор; РУС - регистр управляющего
слова; ВК - конечные выключатели; УМ - усилитель мощности;
ТК - транзисторные ключи; ИП - измерительный преобразова-
тель (датчик обратной связи)
Для управления станками с компьютерными системами ЧПУ [1, 2] разработана система управления класса PRCNC. Схема системы управления показана на рис.50.
Система построена по принципу разделения выполняемых задач между функционально-законченными блоками или группами блоков (рис.8), то есть выполнение задач ЧПУ, в том числе и интерполяция по нескольким осям, переносится на уровень непосредственных исполнителей (блоков управления). Исполнители выполняют задачу, взаимодействуя (договариваясь) между собой по сети. Это позволяет комплектовать устройство ЧПУ нужным количеством блоков управления, наращивая число осей перемещений или входов-выходов электроавтоматики (ЭА), без изменения системного программного обеспечения, а также использовать небольшое число разновидностей блоков управления (в данной системе – две).
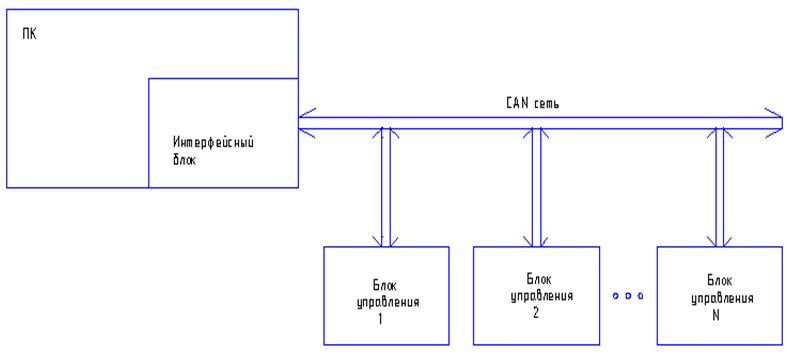
Рис. 52. Структурная схема
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.