Максимальная частота вращения шпинделя
nшп = 0,98× 2730 =2675 мин-1.
Минимальная частота вращения шпинделя определяется механической характеристикой двигателя и параметрами трения в ременной передаче и подшипниках шпинделя и составляет в данном случае 100 мин-1.
Крутящий момент на шпинделе можно определить по формуле
Мшп= N/n, Н*м
В данном случае, при n=1000 мин-1 крутящий момент М=370/1000= 0,37 Н*м.
Таблица 3
Элементы кинематической схемы станка модели Т-4Ф3
|
Обозначения в схеме |
Наименова-ние |
Значение параметра |
Обозна-чения в схеме |
Наименова-ние |
Значение параметра |
|
М1 |
Электродви-гатель асинхронный с короткозамк-нутым ротором |
0,37 кВт, 220 В, 50 Гц, 2730 мин-1 |
М4 |
Электро-двигатель асинхрон-ный конденса-торный Д32 |
12Вт, 72мин-1, 127 В, 0,16 Н*м |
|
D1/D2 |
Диаметры шкивов |
1:1 |
Z5 |
Число заходов |
1 |
|
М2 |
Электродви-гатель постоянного тока с постоянными магнитами |
0,11 Н*м, 30 В, 3000 мин-1 |
Z6 |
Число зубьев |
30 |
|
Z1 |
Число заходов |
1 |
КХ |
Делитель-ный диск |
4 |
|
Z2 |
Число зубьев |
40 |
D1 |
Датчик фотоим-пульсный ВЕ-178А |
1000 импульсов/об, 5 В |
|
Р1 |
Шаг винта |
2 мм |
D2 |
Датчик фотоим-пульсный |
50 импульсов/об |
|
М3 |
Электродви-гатель постоянного тока с постоянными магнитами |
3000 мин-1 0,11 Н*м, 30 В |
D3 |
Датчик фотоим- пульсный, ВЕ-178А |
1000 импульсов/об, 5 В |
|
Z3 |
Число заходов |
1 |
М5 |
Электро-двигатель асихронный конденса-торный Д32 |
12 Вт, 24мин-1, 127 В, 0,16 Н*м |
|
Z4 |
Число зубьев |
40 |
Z7 |
Число зубьев |
16 |
|
Р2 |
Шаг винта |
Трап, 2 мм, лев |
Z8 |
Число зубьев |
19 |
|
ВК1–ВК5 |
Конечные выключатели |
Р3 |
Шаг винта |
1,5 мм лев. |
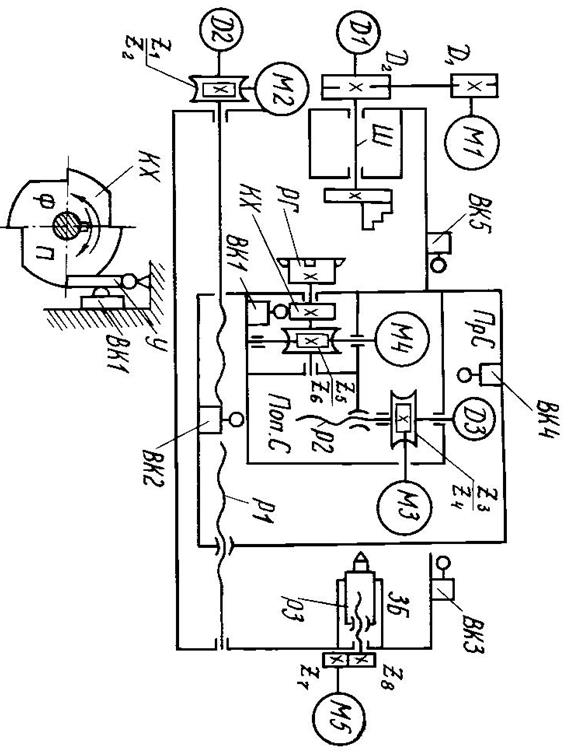
Рис. 7. Кинематическая схема станка Т-43: Ш - шпиндель; ПрС - продольный суппорт; Д1...Д3 - датчики обратной связи; РГ - револьверная головка;
КХ - колесо (делительное) храповое; С - собачка (упор) храпового механизма; Ф - направление поворота РГ для фиксации позиции; П - направление поворота РГ для поиска заданной в УП позиции
Привод продольной подачи осуществляется от бесступенчато регулируемого двигателя постоянного тока М2, через червячный редуктор Z1/Z2 c передаточным отношением 1/40 на ходовой винт P1 (трап. 14*2, левая) Привод поперечной подачи аналогичен и осуществляется от двигателя М3 через червячный редуктор Z3/Z4 c передаточным отношением 1/40 на винт P2 (трап. 10*2, левая) Зазоры в винтовых парах регулируются при наладке и могут компенсироваться программно. Условием согласования цепи подач является:
n мин-1 электродвигателя соответствует перемещение суппорта на S мм/мин.
Уравнение кинематического баланса цепи подач
S= n*i ч.п *P1.
Максимальная скорость подачи:
S = 3000*(1/40)*2 = 150 мм/мин.
Минимальная подача определяется диапазоном регулирования электродвигателя и величиной сопротивления сил трения в винтовой паре и напрвляющих соответствующего суппорта.
Тяговая сила подачи определяется по формуле
Q=2*М*π*ή/P*i
В данном случае расчетная тяговая сила подачи
Q=2*0,11*3,14*0,5/(1/40) =3140 Н
Режущий инструмент (резцы, осевой инструмент) устанавливается в пазах резцедержки четырехпозиционной револьверной головки, которая закреплена на поперечном суппорте. Привод поворота головки осуществляется от асинхронного конденсаторного электродвигателя М4 через червячную передачу Z5/Z6 c передаточным отношением 1/30.
Скорость поворота можно определить следующим образом:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.