где
![]() радиус вектор
радиус вектор ![]() й
контрольной точки,
й
контрольной точки,
![]() й, базисный сплайн,
й, базисный сплайн,
![]() радиус вектор, точек кривой, заданной
сплайном.
радиус вектор, точек кривой, заданной
сплайном.
Параметр t изменяется от 0 до 1.
Базисные
сплайны будем вычислять с помощью рекуррентных формул, описанных в [1], т.е. с
помощью треугольной таблицы. Отличие состоит в том, что, при использовании
параметрического вида В-сплайна, носители всех базисных сплайнов будут
находиться в промежутке от 0 до 1 параметра t. Никаких отличий в вычислениях нет, однако нам необходимо из
последовательности заданных контрольных точек, получить последовательность
интервалов ![]() параметра t. Выполним это простым делением интервала
параметра t. Выполним это простым делением интервала ![]() на n-1 равных промежутков, где n – число контрольных точек.
на n-1 равных промежутков, где n – число контрольных точек.
Основные этапы метода аналогичны случаю кубического сплайна, и отличаются лишь расчетными формулами, которые, естественно, выведены для параметрического задания В-сплайна. Поэтому не будем здесь описывать метод подробно.
Реализация сплайновой интерполяции в УЧПУ на базе персонального компьютера позволяет получить следующие положительные результаты:
1) уменьшение объема управляющих программ;
2) сокращение времени генерации управляющих программ;
3) сокращение времени обработки изделия;
4) улучшение качества обрабатываемой поверхности и, как следствие, исключение операции ручной доводки;
5) уменьшение износа оборудования вследствие улучшения динамики процесса металлообработки.
Разработанные алгоритмы были реализованы в программном обеспечении систем управления токарным станком и фрезерным станком. Были разработаны форматы новых команд для двумерного и трехмерного случаев. Система команд УЧПУ токарного станка была расширена двумя новыми командами, УЧПУ фрезерного – одной командой. Т.е. была проведена модернизация устройств числового программного управления данных металлорежущих станков. После разработки постпроцессоров для CAD-систем под устройства ЧПУ этих станков, будет возможным генерация управляющих программ без использования процедур аппроксимации линейными отрезками и дугами окружностей.
При
разработке был использован
язык ”C”.
Были проведены испытания алгоритмов, подтвердившие теоретические расчеты, и показавшие высокую эффективность описанных выше методов.
В данной статье описан алгоритм воспроизведения устройством числового программного управления криволинейной траектории, заданной с помощью В-сплайна. Рассматривается двумерный случай В-сплайна, применимый в УЧПУ токарного станка.
Алгоритм был реализован в программном обеспечении УЧПУ токарного станка, разработанного на кафедре “Станки и инструмент” ЮУрГУ.
При разработке алгоритма, будем использовать параметрическое представление В-сплайна, описанное в [2]. Это даст возможность впоследствии с минимальными изменениями перенести алгоритм на трехмерный случай для фрезерного станка. Сплайн в этом случае определяется векторным уравнений:
![]() (1)
(1)
где ![]() радиус вектор
радиус вектор ![]() й
контрольной точки,
й
контрольной точки,
![]() й, базисный сплайн,
й, базисный сплайн,
![]() радиус вектор, точек кривой, заданной
сплайном.
радиус вектор, точек кривой, заданной
сплайном.
Параметр t изменяется от 0 до 1.
Базисные сплайны будем вычислять с помощью рекуррентных формул,
описанных в [1], т.е. с помощью треугольной таблицы. Отличие состоит в том,
что, при использовании параметрического вида В-сплайна, носители всех базисных
сплайнов будут находиться в промежутке от 0 до 1 параметра t.
Никаких отличий в вычислениях нет, однако нам необходимо из последовательности
заданных контрольных точек, получить последовательность интервалов ![]() параметра t. Выполним это
простым делением интервала
параметра t. Выполним это
простым делением интервала ![]() на n-1
равных промежутков, где n – число контрольных точек.
на n-1
равных промежутков, где n – число контрольных точек.
В-сплайн для точек [x1,y1],[x2,y2],[x3,y3] показан на рис. 1.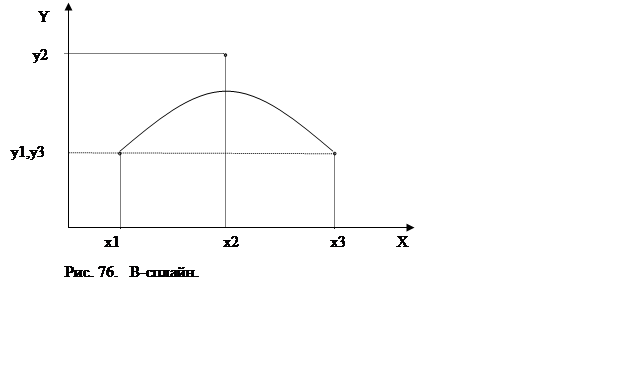
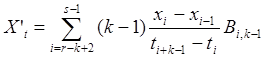
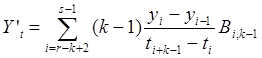
Cначала попытаемся использовать вектор движения, параллельный, касательной к траектории. Для его нахождения необходимо найти производные x и y по t. Дифференцирование В-сплайнов подробно описано в [1].
Можно записать следующие формулы, для ![]()
 на
на ![]()
 на
на ![]()
т.е. для нахождения производных, необходимо вычислить
все не равные 0 на ![]() базисные сплайны, порядок
которых на единицу меньше, т.е.
базисные сплайны, порядок
которых на единицу меньше, т.е.![]()
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.