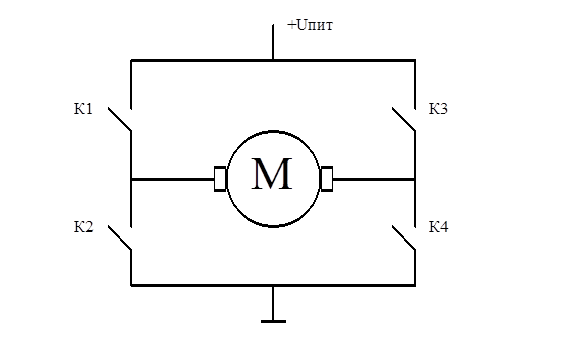
Рис. 60. Коммутация двигателя
5.4. Работа следящей системы
Угол поворота шпинделя измеряется измерительным преобразователем - цифровым датчиком обратной связи (рис. 59).
Вычисляется фактическая частота вращения шпинделя nф. Формирователь управляющего сигнала и регулятор скорости в зависимости от заданной частоты вращения nз и фактической nф формирует необходимый сигнал управления, который в кодированном виде подается на ШИП.
Таким образом, имеем регулируемый замкнутый по скорости электропривод главного движения. Силовая часть электропривода (выпрямитель, ШИП, электродвигатель), электрически развязана с цифровой частью.
Цифровая часть привода состоит из аппаратной (блок микроконтроллера) и программной. Блок микроконтроллера обеспечивает обработку (преобразование и кодирование) сигналов с датчиков обратной связи, преобразование и передачу управляющих сигналов от компьютера на ШИП.
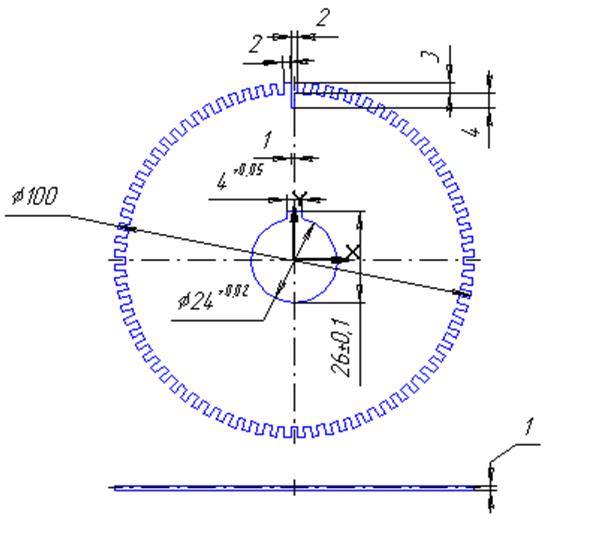
Рис.61. Диск датчика
Токовая защита срабатывает тогда, когда ток, потребляемый ШИП от источника питания, превысит величину номинального тока в 3 раза.
Регулирование частоты вращения двигателя (и соответственно, шпинделя) выполняется вниз от номинальной частоты вращения.
Наиболее эффективной и часто применяемой в системах числового управления приводами подач является система контурного управления, которая обеспечивает формообразование за счет одновременного согласованного движения рабочего органа вдоль нескольких управляемых осей [29-33].
При контурном управлении применяют следящие электроприводы с обратной связью по положению рабочего органа, с помощью которых устройство числового программного управления осуществляет координацию движений всех управляемых координат в каждый момент времени, обеспечивая тем самым точную обработку любой заданной траектории.
Следящий привод подачи станка Т-3Ф3 (рис. 60) представляет собой систему автоматического регулирования, замкнутую по положению. В ее состав входят регулируемый электропривод с двигателем и цифровым датчиком положения, система управления приводом. Назначением следящих приводов является точное (с погрешностью не более 1...2%) и согласованное воспроизведение задаваемых управляющей программой обработки детали перемещений суппортов по осям Z (подача продольного суппорта) и Х (подача поперечного суппорта).
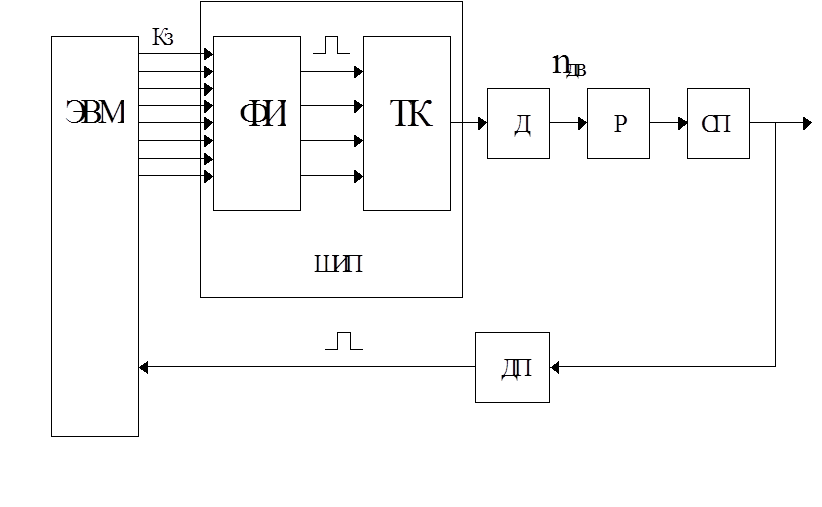
Рис. 62. Структурная схема привода подач
Приводы продольной и поперечной подач станка одинаковы. В приводах подач станка Т-4ФЗ применены малоинерционные двигатели постоянного тока Р1К6-25/3 (30 В, 0,11 Нм, 3000 мин-1) болгарского производства, обладающие высоким быстродействием и высокими точностными характеристиками. Перегрузочная способность электродвигателя равна 5×I ном.
Замыкание обратной связью по положению обеспечивается фотоимпульсный датчик ВЕ-178А (1000 имп/об) (рис. 61-64, табл.7 ). Датчики приводятся от ходовых винтов и измеряют фактический угол поворота винта. Импульсы фактической отработки управляющего сигнала подаются в блок микроконтроллера, суммируются и информация о положении используется формирователем управляющего сигнала и регулятором положения для формирования и кодирования сигнала управления, который подаётся затем на ШИПы соответствующих приводов подачи. Информация о положении может также считываться по запросу в ПК.
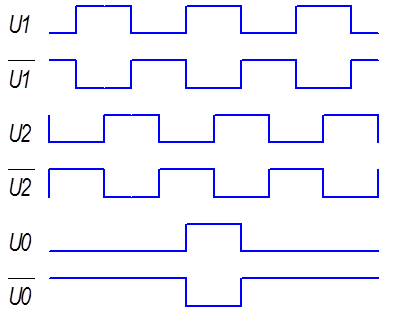
Рис. 63. Схема сигналов датчика
Таблица 7
1. Класс точности преобразователя по ГОСТ 26242-84…………………8
2. Выходные сигналы:
1– основной
2 – инверсный основному
3 – смещенный
4 – инверсный смещенному
5 – начало отсчета
6 – инверсный началу отчета
3. Форма сигналов ……………………………………………………….прямоугольная
4. Длительность сигналов 5 и 6 в долях основного сигнала……………………0,25
5. Предел допускаемого значения погрешности перемещения, угловые с …240
6. Стабилизированное постоянное напряжение на электронную часть, В.1,5
7. Стабилизированное постоянное напряжение на осветитель, В… 5
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.