- представление необходимой пользователю информации в удобном для него виде.
Рис.67.

6.2. Решение задач интерполяции
Вычислительное содержание задачи формообразования, сводящееся по существу к воспроизведению заданных траекторий включает: движение по заданной траектории (интерполяция), поддержка постоянной контурной скорости.
Задачи интерполяции траектории являются основной составляющей частью управления движением и занимают по времени не менее 35%-40% общего цикла оперативного управления.
6.2.1. Линейная интерполяция
Блок схема алгоритма линейной интерполяции показана на рис. 26.
В основе применяемого алгоритма линейной интерполяции лежит определение составляющей вектора контурной скорости по координатам Х и Z (рис. 65).
Составляющая вектора скорости подачи Vх по координате Х рассчитываются по формуле:
![]() ;
;
где Vk - контурная скорость подачи;
dx, dz - приращения перемещений.
Составляющая вектора по координате Z рассчитываются по формуле:
![]() ;
;
После определения составляющих вектора контурной скорости происходит чтение и сохранение текущего состояния датчиков обратной связи по положению приводов подач (pred_d_i) (рис. 66). Начинается основной цикл алгоритма, он длится до тех пор пока заданные приращения вдоль координат Х и Z (dX и dZ) не станут равными 0 (dX = 0, dZ = 0).
Основной цикл алгоритма состоит из двух частей. Первая содержит обработку данных, относящихся к приводу Х, вторая - к приводу Z. Обработка данных ведётся последовательно - сначала по координате Х, затем по координате Z. В блоке обработки данных по координате Х сначала происходит сравнение текущего и предыдущего показаний датчика положения. Если показания не изменились, то происходит переход к обработке данных по Z. Если показания датчика изменились, то производится проверка флага завершения перемещения по координате Х, если флаг установлен, то - переход к обработке данных по Z. Если флаг не установлен, то производится вычисление смещения суппорта по координате Х и уменьшение заданного перемещения на эту величину. Далее производится аналогичная обработка данных по координате Z.
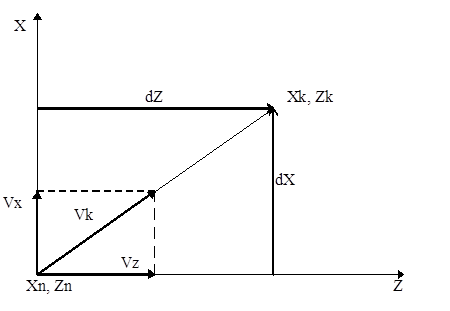
Рис. 69. Линейная интерполяция
После обработки данных по Х и по Z следует блок коррекции скорости. В соответствие с текущими значениями заданных перемещений производится вычисление составляющих контурной скорости по выражениям Vx и Vz.
Передача данных от программы к интерфейсу управления осуществляется через порты компьютера. Данные (управляющий код или управляющее слово) записываются в соответствующий порт.
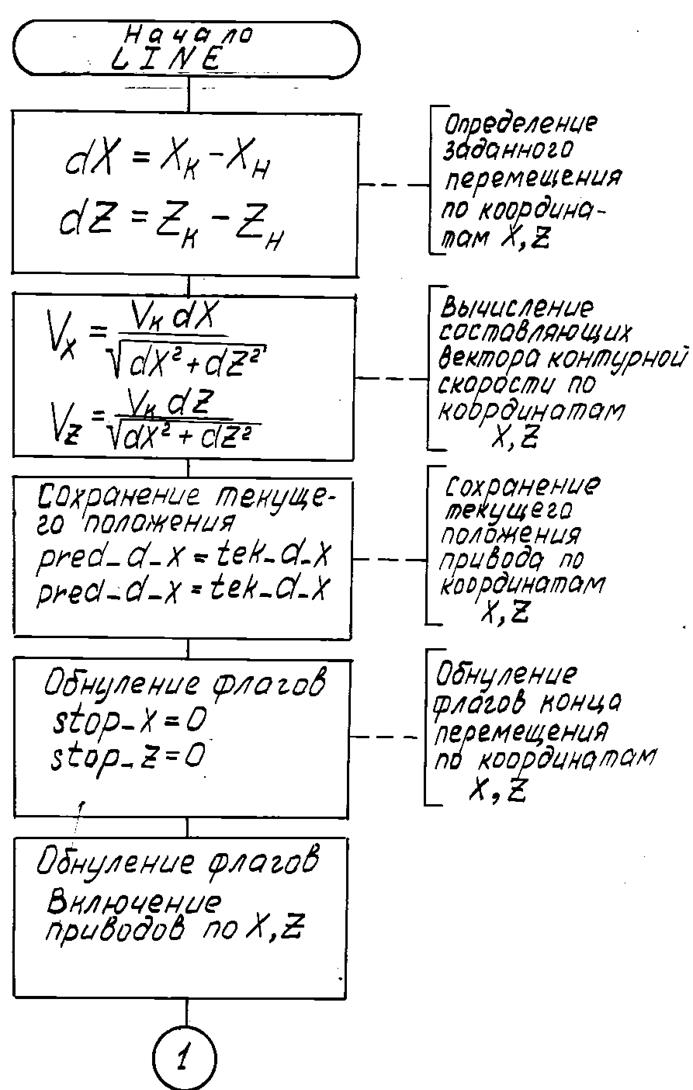
Рис. 70. Алгоритм линейной интерполяции
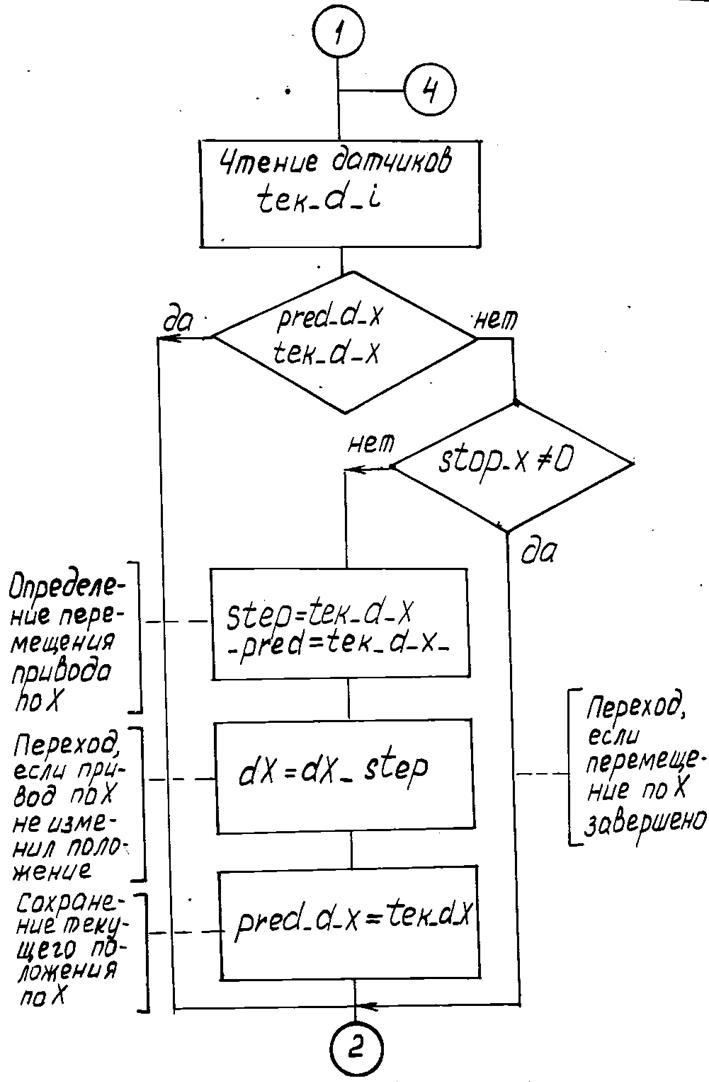
Рис.70. Алгоритм линейной интерполяции (продолжение)
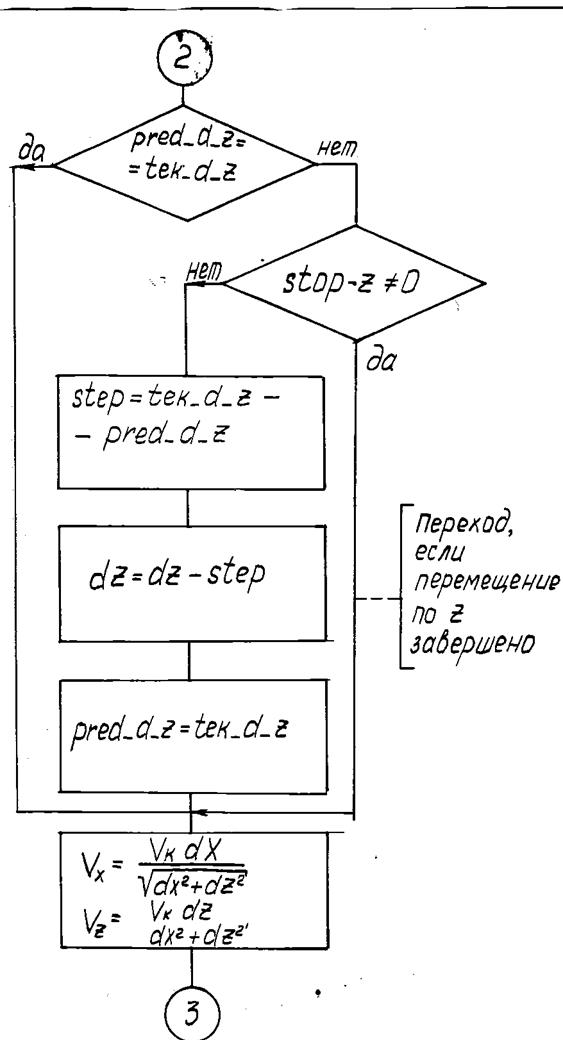
Рис. 70. Схема алгоритма линейной интерполяции (продолжение)
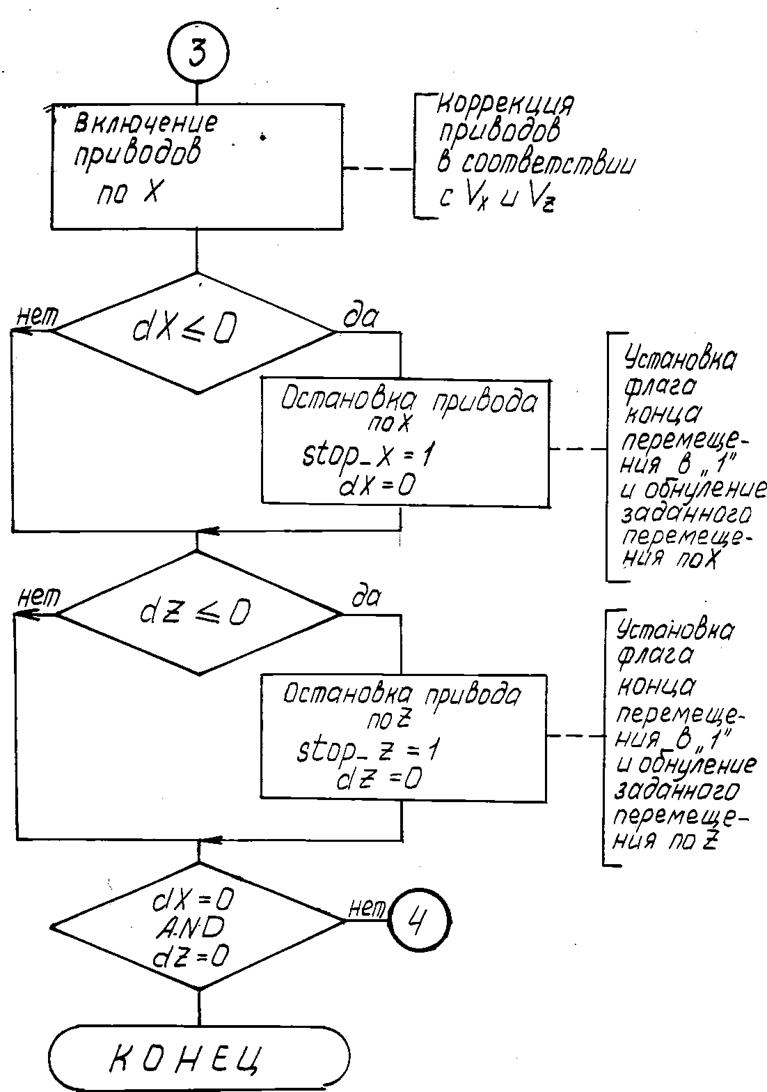
Рис.70. Алгоритм линейной интерполяции (окончание)
Преобразование кода скорости подачи в код производится по следующей формуле:
Vcod = (Npod × 255)/150;
где Vcod - кодированное значение скорости подачи;
Npod - требуемая скорость подачи в мм/мин.
Требуемая скорость главного движения, преобразованная в код, передаётся в формирователь импульсов путём записи этого кода в соответствующий порт.
Следующим шагом в работе алгоритма является проверка на завершение заданного перемещения вдоль координат. Если перемещение по Х или по Z завершено, то происходит установка соответствующего флага в “1” и обнуление заданного перемещения вдоль этой координаты.
6.2.2. Круговая интерполяция
Алгоритм круговой интерполяции (рис. 28) построен по принципу аппроксимации дуги окружности линейными отрезками (рис. 29). На этапе подготовки данных определяются начальный Аn и конечный Aк углы дуги окружности. Определение этих углов производится по формулам:
An = arctan(Xstart/Zstart);
где Xstart, Zstart - координаты начальной точки дуги окружности;
Ak = arctan(Xendt/Zend);
где Xend, Zend - координаты начальной точки дуги окружности.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.