 Гидравлические и пневматические преобразователи
преобразуют контролируемую величину (скорость течения, расход) в давление или
расход жидкости или газа и по принципу действия могут быть струйными или
дроссельными.
Гидравлические и пневматические преобразователи
преобразуют контролируемую величину (скорость течения, расход) в давление или
расход жидкости или газа и по принципу действия могут быть струйными или
дроссельными.
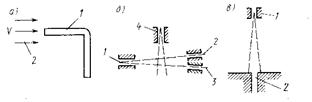
Рис. 2.10. Струйные преобразователи расхода (скорости) жидкости или газа в давление
Струйные преобразователи широко распространены в гидравлическом и в пневматическом исполнении. На рис. 2.10 показаны различные варианты струйных преобразователей скорости течения потока (расхода Q) в давление (перепад давлений).
На рис. 2.10, а изображена схема датчика скорости потока, получившего название «трубки Пито». Датчик представляет собой изогнутую трубку 1, входное сопло которой повернуто навстречу потоку 2. Давление в трубке складывается из статического давления Ро и динамического давления, пропорционального квадрату скорости потока.
p=p0+ρv2/2, откуда v=![]()
Схема струйного пневмодатчика изображена на рис. 2.10, 6. При отсутствии входного сиг струя газа из сопла 1 равномерно распределяется между приемными соплами 2 и З. Если же из сопла 4 поступает поток газа, то чем больше его энергия, тем больше он отклоняет от нейтрали потока из сопла 1. При этом происходит перераспределение потока между приемными соплами 2 и З и возникает перепад давлений между ними, пропорциональный энергии потока из сопла 4.
На рис. 2.10, в показан струйный преобразователь расхода жидкости или газа сквозь сопло 1 в давление в сопле 2. При этом так как расход равен Q=v*S(где v-скорость струи на выход из сопла, S площадь проходного сечения сопла 1), а избыточное давление в сопле 2 равно p=ρ*v2 2 /2 (где v2 скорость струи у входа в сопло 2, ρ—плотности газа, то при близком расположении сопл друг от друга, т. е. при имеет место соотношение
p=ρQ2/2S2
Если сопла отстоят друг от друга на расстоянии, превышающем несколько диаметром сопл, то
26. Пневматический усилитель мощности. Назначение, принцип действия.
 В промышленной пневмогидроавтоматике широкое
распространение получили усилители давления с силовой компенсацией, принцип
действия которых иллюстрирует рис. 2.32, а. Входное давление Рвх преобразуется
в преобразователе 1 <давление—сила в Fi
(рис. 2.32, а). Аналогично, выходное давление Рвых устройством обратной связи 4
также преобразуется в силу F2. Усилия F1 и F2
сравниваются в устройстве 2, и их разность преобразуется в
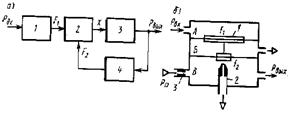
В промышленной пневмогидроавтоматике широкое
распространение получили усилители давления с силовой компенсацией, принцип
действия которых иллюстрирует рис. 2.32, а. Входное давление Рвх преобразуется
в преобразователе 1 <давление—сила в Fi
(рис. 2.32, а). Аналогично, выходное давление Рвых устройством обратной связи 4
также преобразуется в силу F2. Усилия F1 и F2
сравниваются в устройстве 2, и их разность преобразуется в
Рис. 2.32. Пневматические усилители с силовой компенсацией
перемещение х , далее механопневматическим (механогидравлическим) преобразователем 3—в давление Рвых . В качестве устройства 3 наиболее часто используются преобразователи типа сопло-заслонка .
Использование компенсации сил позволяет свести перемещения подвижных элементов к минимуму, что повышает точность преобразования, а если в качестве заслонки использовать жестко закрепленные мембраны, то последнее позволяет избавиться от перемещающихся с трением друг относительно друга подвижных частей усилителей.
Усиление входного давления осуществляется за счет выбора различных эффективных площадей преобразователей давления в силу 2 и 4 (рис. 2.32, а). В качестве примера на рис. 2.32, 6 представлен простейший мембранный пневматический усилитель давления, подвижным узлом которого является мембранный блок 1, Связывающий воедино две мембраны различных эффективных площадей f1 и f2 . Давление питания Рп поступает через постоянный дроссель З в камеру В, в которой расположено сопло 2. Камера В является проточной и соединена с выходным каналом пневмоусилителя. Сопло 2 соединено с атмосферой.
Входное давление Рвх подается в глухую камеру А и, воздействуя на эффективную площадь f1 мембранного блока, создает силу Fi=Рвхf1. Таким образом реализуется преобразователь 1 (рис. 2.32, а). Мембранный блок Смещается вниз (камера Б соединена с атмосферой), смещается мембрана с эффективной площадью f2 относительно сопла 2 (рис. 2.32, 6) и в камере В давление Рвых повышается. При этом на мембранный блок со стороны камеры В действует сила F2=Рвыхf2 т. е. реализуется преобразователь 4 (рис. 2.32, а).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.