Перемещение РО проп-но
отклонению и скорости изменения РВ: ![]() или скорость
проп-на скорости изменения РВ и ускорению:
или скорость
проп-на скорости изменения РВ и ускорению: ![]() .
В операторной форме:
.
В операторной форме:![]() . Рег-р, работающий по
такому з-ну, наз-ся статическим рег-ром с предварением и 2-мя пар-ми
настройки: С1 и С2. ПФ этого рег-ра имеет вид:
. Рег-р, работающий по
такому з-ну, наз-ся статическим рег-ром с предварением и 2-мя пар-ми
настройки: С1 и С2. ПФ этого рег-ра имеет вид: ![]()
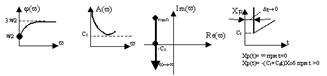
Хар-ки этого рег-ра: АФЧХ
![]() ; АЧХ А(v)=
; АЧХ А(v)=![]()
ФЧХ j(v)=p+
arctg![]() ;
ЛАЧХ L(v)=20 lg
;
ЛАЧХ L(v)=20 lg![]()
|
C2=KрТд, Тд – время дифференцирования, а Кр – к-т регулирования. В ПД - рег-ре, как и в П - рег-ре, проявляется влияние статической неравномерности в установившемся режиме на качество рег-ния, т.е. статическая ошибка ¹0.
Дальнейшее совершенствование П
и ПД – рег-ров состоит в придании им св-ва астатизма, т.е. способности с
течением времени устранять статическую ошибку. Отклонение управляющего
воздействия И – рег-ра проп-но ∫-лу РВ: ![]() или
скорость рег-ния проп-на отклонению РВ:
или
скорость рег-ния проп-на отклонению РВ: ![]() .
В операторной форме:
.
В операторной форме: ![]() , где С0 – настроечный пар-р рег-ра. ПФ
этого рег-ра:
, где С0 – настроечный пар-р рег-ра. ПФ
этого рег-ра: ![]() . А его хар-ки имеют вид:
АФЧХ
. А его хар-ки имеют вид:
АФЧХ ![]()
|
С0=Кр/Ти , где Кр – к/т передачи рег-ра, а Ти – время интегрирования. При отклонении РВ Хоб от заданной величины И - рег-р будет перемещать раб. орган до тех пор, пока Хоб не остановится на заданной вел-не.
АЧХ: ![]()
![]() ,
ФЧХ:
,
ФЧХ: ![]()
![]()
|
ПИД – рег-р имеет три настроечных пар-ра: С0, С1 и С2 .
При Тд=0 получаем ПИ – закон,
Ти®¥ получаем ПД – закон,
Ти®¥ и Тд=0 получаем П – закон.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.