Если переходная кривая харк-ся наличием транспортного запаздывания, то порядок расчета в этом случае следующий:
1. опред-ем по графику заданной кривой запаздывание t как время в течение которого ф-ция h(t) от t=0 до t=t не превышает 0.001h(¥)/
2. опред-ем ПФ объекта как произведение 2-х ф-ций: W1(p)=exp(-tp), соответствующей запаздыванию и W2(p), сот-щей ф-ции h(t)=h(t-t), для которой за начало отсчета принято время t=t. Порядок расчета W2(р) изветен, т.к. написан выше. Тогда ПФ объекта запишется так: W(p)=W1(p)*W2(p).
Формулы для определения РАФЧХ:
1. Для объекта W(m,jw)ОБ = A(m,w)ОБe –jj(m,w)об
А(m,w)ОБ = FОБ(w,m,k,T,t) j(m,w)ОБ = ФОБ(w,m,k,T,t)
2. Для регулятора W(m,jw)РЕГ=A(m,w)РЕГe –jj(m,w)рег
А(m,w)РЕГ = FРЕГ(w,m,с0,с1,с2) j(m,w)РЕГ = ФРЕГ(w,m,с0,с1,с2)
3. Используя условие устойчивости системы W(m,jw)ОБ* W(m,jw)Р=1
A(m,w)РЕГe –jj(m,w)рег = 1/ {A(m,w)ОБe –jj(m,w)об}
Равенство 2х комплексных чисел возможно в том случае, если равны
![]() модули
векторов: A(m,w)РЕГ = 1/ A(m,w)ОБ
и j(m,w)РЕГ = –j(m,w)ОБ
модули
векторов: A(m,w)РЕГ = 1/ A(m,w)ОБ
и j(m,w)РЕГ = –j(m,w)ОБ
FРЕГ(w,m,с0,с1,с2)=1/ FОБ(w,m,k,T,t)
ФРЕГ(w,m,с0,с1,с2)=1/ ФОБ(w,m,k,T,t)
![]() 4.
Решаем систему уравнений c 2Я неизвестными:
4.
Решаем систему уравнений c 2Я неизвестными:
![]() С0=f0(m,w,k,T,t,C2)
C0=F1(w,C2)
С0=f0(m,w,k,T,t,C2)
C0=F1(w,C2)
С1=f1(m,w,k,T,t,C2) C1=F2(w,C2) (*)
5. Если расчет ведут для рег-ра с двумя пар-ми настройки, то палагают, что С2=0. Если рег-р с тремя пар-ми настройки, то определяют С0 и С1 в звис-ти от частоты w для различных С2.
6. Подставить в ур-ние (*) численное значение частоты от w=0 до w= значению, при котором С0 становится < 0. Строим график завис-ти С0=f(С1). Если рег-р с 3-мя пар-ми, то строят неск-ко завис-тей С0=f(С1) для различных С2, начиная с С2=0.
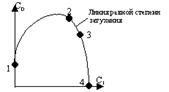
Все С0 и С1, лежащие внутри области ограниченной кривой, обеспечивают процесс рег-ния y > yзад, а лежащие вне области y < yзад. Если токи на кривой, то y = const(>0). На кривой выбирается нес-ко точек, для каждой из них с помощью ЭВМ(АСОТАР) строим ПП и находим оптимальные настройки. Оптимальным считается процесс, соответствующий точке 2, т.к. статич. ошибка d=0 и длительность ПП будет min. Оптимальные настройки получаются в точках, которые находятся правее линии максимума. Значения настроечных пар-ро, лежащие на пересечении кривой с осью абсцисс, т.е. С0=0 соответствуют П-рег-ру и характ-ся остаточной неравномерностью (точка 4). Значения настроечных пар-ро, лежащие на пересечении кривой с осью ординат, т.е. С1=0 соответствуют И-рег-ру, называемому атстатическим, т.е. без ошибки (точка 1). Выбираем y=0.75-0.9. если y<0.75, то процесс будет недостаточно интенсивный. Если y>0.9, то имеем дело с завышенным отклонением регулируемой величины.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.