Применение этого же преобразования к импульсу, сдвинутому на kT0, дает
![]() .
.
С учетом этих соотношений уравнение (3.8) приобретает вид
 .
.
Отсюда следует, что преобразование Лапласа дискретной функции времени является периодической функцией с частотой повторения w0 = 2p/T0.
Для точного восстановления непрерывного сигнала по последовательности его дискретных значений необходимо, чтобы частота квантования w0 удовлетворяла условию теоремы Котельникова
w0³ 2wmax .
Следовательно, для такта квантования Т0должно выполняться условие
T0 £p/wmax.
Заметим, что в системах управления или передачи информации на практике непрерывные сигналы с ограниченными спектрами не встречаются. Тем не менее, в теории цифрового управления частота
wSh = w0/2 = p/T0
играет роль своего рода эталонной константы. Она определяет полосу пропускания дискретной системы.
Фиксирующий элемент. Если в дискретной системе после квантователя стоит фиксатор (экстраполятор нулевого порядка), который на период, равный такту квантования, фиксирует мгновенное значение дискретного сигнала x(kT0), на его выходе формируется ступенчатый сигнал (рис. 3.8).
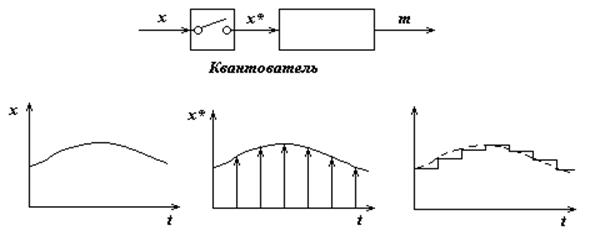
Рис. 3.8.
Передаточную функцию экстраполятора нулевого порядка можно получить следующим образом. Предположим, на вход его поступает последовательность импульсов
 .
.
Выходом экстраполятора является ступенчатый сигнал
 .
.
Выполнив преобразование Лапласа, получаем передаточную функцию экстраполятора нулевого порядка:
|
|
(3.9) |
На низких частотах он ведет себя подобно фильтру с передаточной функцией апериодического звена:
 .
.
Определив новую переменную
|
|
(3.10) |
подставим ее в уравнение (3.9). В результате получаем z-преобразование импульсного сигнала x*(t):
|
|
(3.11) |
Этот бесконечный ряд сходится, если все его члены êx(kT0)êограничены и если справедливо условие êzê>1. Поскольку величина s может выбираться произвольно, сходимость имеет место для широкого класса функций x(kT0). Следует иметь в виду, что метод z-преобразования основывается на тех же предположениях, что и преобразование Лапласа, причем особенно важно выполнение условия x(kT0) при k <0.
Приведенные в разделе 3.6 примеры иллюстрируют методику получения z-преобразования для некоторых простейших функций. Аналогичным способом составляются таблицы, содержащие наиболее часто употребляемые функции. Таблицы такого рода помещены в книгах, посвященных теории автоматического управления. В них для непрерывных функций времени даны преобразования Лапласа и z-преобразования.
Теоремы z-преобразования. Ниже приведены некоторые важнейшие теоремы, используемые при вычислении z-преобразований. Вывод этих теорем можно найти в книгах, перечисленных в списке литературы.
а). Линейность
![]()
б). Сдвиг по времени вправо
![]() d
³ 0.
d
³ 0.
в). Сдвиг по времени влево
 d
³ 0.
d
³ 0.
г). Изменение масштаба по временной координате z
![]() .
.
д). Начальное значение
![]()
е). Конечное значение

Обратное z-преобразование. В отличие от преобразования Лапласа, для которого прямой и обратный переходы x(t) ® x(s) и x(s) ® x(t)выполняются однозначно, z-преобразование x(t) ® x(z) и обратное z-преобразование x(z) ® x(t) не обладают этим свойством. Объясняется это тем, что они не учитывают поведения функции x(t) в промежутках между моментами срабатывания квантователя. В то же время преобразование x(kT0) ® x(z) и обратное преобразование x(z) ® x(kT0)- взаимно однозначны.
На практике обратное z-преобразование вычисляют, записывая функцию x(z) как сумму элементарных членов, содержащихся в таблицах z-преобразований.
Предположим, что квантователь стоит на входе линейной системы с передаточной функцией W(s) или переходной функцией g(t), как показано на рисунке 3.9. Импульсный входной сигнал, поступающий в систему, описывается выражением
|
|
(3.12) |
Учитывая, что переходная функция g(t) определяет реакцию системы на единичный импульс d(t), ее выходной сигнал выражается суммой свертки:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.