Рис. 1.10.
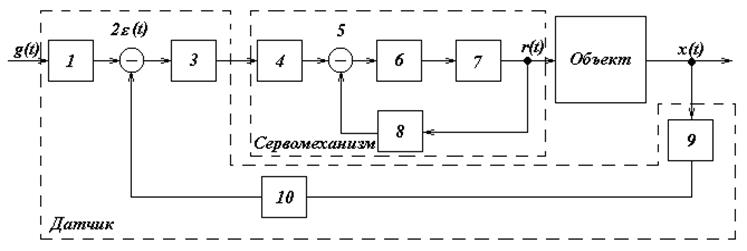
Устройства и элементы, входящие в регулятор, по своему функциональному признаку (по назначению) могут быть классифицированы следующим образом:
Задающее устройство 1 преобразует управляющее воздействие u(t) в управляющий сигнал, пропорциональный заданному значению управляемой переменной x0(t) и удобный для сравнения с действительным значением управляемой переменной x(t). Задающими устройствами могут быть пружины, калиброванные сопротивления, уровни и т. п. Программные устройства используют в системах программного управления, где заданные значения управляемой переменнойдолжны изменяться по определенному закону. В сложных современных системах выработка заданной функции осуществляется вычислительными устройствами, которые называют программирующими устройствами.
Сравнивающее устройство 2 на основании сравнения управляющего сигнала и сигнала главной обратной связи вырабатывает сигнал рассогласования e(t). Устройства сравнения предназначены для измерения отклонений управляемых переменныхот заданных значений. Они могут представлять собой арифметическое устройство.
Преобразующее устройство 3 преобразует одну физическую величину в другую, более удобную для использования в процессе управления, не выполняя при этом функций измерения, усиления или коррекции.
Корректирующие устройства 4 и 8 повышают устойчивость и улучшают динамические свойства системы управления. В зависимости от способов включения корректирующие устройства подразделяют на последовательные и параллельные. С помощью последовательных корректирующих устройств преобразуется сигнал рассогласования и в закон управления вводятся воздействия по производным и интегралам управляемых переменных по времени. Параллельные корректирующие устройства (местные обратные связи) осуществляют подачу сигнала с выхода элемента на вход одного из предыдущих.
Вспомогательное сравнивающее устройство 5 сравнивает сигнал в промежуточной точке прямой цепи с сигналом местной обратной связи. Усилительное устройство 6 предназначено для усиления мощности сигналов в регуляторах. Оно управляет энергией, которая поступает от постоянного источника энергии. Применяют электронные и элект-ромагнитные усилители, гидравлические золотники, пневматические усилители и т.д.
Исполнительное устройство 7 вырабатывает управляющее воздействие u(t), непосредственно прикладываемое к объекту управления и оказывающее воздействие на регулирующий орган. Исполнительные устройства, осуществляющие механическое перемещение регулирующего органа, называют исполнительными двигателями, или сервомоторами.
Чувствительные, или измерительные элементы 9 предназначены для преобразования управляемых переменных или возмущающих воздействий в сигналы управления, удобные для дальнейшего использования в процессе управления. Чаще всего значения управляемых переменных преобразуются в пропорциональные электрические сигналы или механические перемещения.
Элемент главной обратной связи 10, вырабатывающий сигнал, находится в определенной функциональной зависимости от управляемой переменной.
Часть регулятора, которая образует сигнал рассогласования e(t), называют датчиком регулятора. Он состоит из задающего, измерительного и сравнивающего устройств. Часть регулятора, которая преобразует сигнал рассогласования в управляющее воздействие u(t), обычно называют сервомеханизмом.
Таким образом, САУ состоит из трех частей: объекта управления, датчика и сервомеханизма (рис. 1.11).
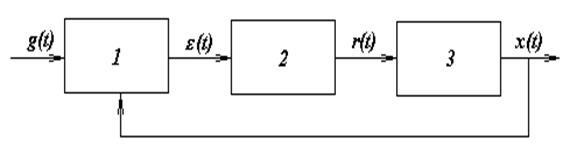
Рис. 1.11.
Конкретные схемы систем управления могут отличаться от типовой схемы, изображенной на рисунке 1.10. Часть устройств может отсутствовать или конструктивно объединяться в одном устройстве, системы управления могут иметь и другие элементы, не показанные на схеме. Функции корректирующих и других устройств могут выполнять цифровые и аналоговые вычислительные машины.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.