Замыкание ключей, стоящих на входе и выходе системы, происходит не одновременно, а с интервалом TR. Эта задержка равна времени, затраченному на преобразование аналоговой информации в цифровую форму и последующую ее обработку в центральном процессоре. Поскольку интервал TR, как правило, значительно меньше постоянных времени исполнительных устройств, датчиков и объектов управления, им часто пренебрегают, полагая, что входные и выходные квантователи действуют синхронно. Кроме того, при использовании ЭВМ, работающих со словами длиной 16 разрядов или более, АЦП, имеющих не менее 10 двоичных разрядов, эффекты квантования по уровню практически незаметны. Поэтому в первом приближении можно считать, что амплитуды дискретных сигналов изменяются непрерывно.
С учетом указанных упрощений структура замкнутого контура управления с ЭВМ в качестве средства обработки дискретной информации приобретает вид, показанный на рисунке 3.3. В этой системе квантователи, действуя синхронно, вырабатывают сигналы, дискретные только по времени. Управляемая переменная u вычисляется по запрограммированному алгоритму, в котором используют текущие значения управляемой переменной y и заданного закона ее изменения y0.
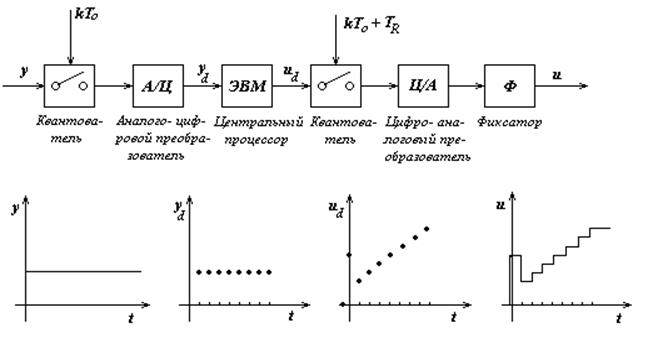
Рис. 3.2.
Проблемы обработки дискретных данных возникают и в других приложениях, например:
- при решении задач, в которых измеряемые переменные доступны лишь в определенные моменты времени (в частности, таковы данные, поступающие с вращающихся антенн радиолокаторов, получаемые при измерении расстояний с помощью радиодальномеров; данные, используемые в социально-экономических, биологических, метеорологических исследованиях и т. п.);
- при мультиплексировании дорогостоящего оборудования связи (кабельных линий, каналов).
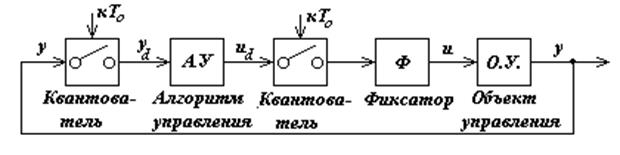
Рис. 3.3.
Проектирование цифровых систем управления. При разработке электронных, пневматических или гидравлических аналоговых регуляторов проектировщик по техническим или экономическим соображениям вынужден пользоваться достаточно узким набором элементов,действующих как интеграторы (И), дифференциаторы (Д) или пропорциональные усилители (П). В силу этого при синтезе систем управления аналогового типа приходится сталкиваться с весьма серьезными ограничениями. Иначе обстоит дело с алгоритмами для управляющих ЭВМ. Гибкость программных средств существенно расширяет возможность реализации сложных алгоритмов. Это создает предпосылки для практического применения новейших методов современной теории управления, но одновременно ставит перед проектировщиком вопрос: какой управляющий алгоритм наиболее эффективен при решении конкретной прикладной задачи? Естественно, ответ на этот вопрос возможен лишь в том случае, когда имеется достаточно полное описание объекта в форме его математической модели и известны показатели, по которым можно сравнивать алгоритмы различных типов. Такими показателями служат качество управления, обеспечиваемое алгоритмом, сложность его реализации, чувствительность к изменению параметров и воздействию помех, требуемая производительность ЭВМ, а также некоторые свойства объекта управления (его линейность или нелинейность, расположение полюсов и нулей передаточных функций, наличие задержек, структура связей в многосвязном объекте).
В рамках методики проектирования цифровых систем управления должны быть решены следующие проблемы:
1. Получение информации об объекте управления и о сигналах. Отправной точкой процесса проектирования системы управления является информация об объекте управления и о сигналах, участвующих в его описании. Она может быть представлена в различных формах, например:
- в виде доступных непосредственному измерению входов, выходов, переменных состояния;
- в форме моделей объектов управления и моделей сигналов;
- в форме оценок сигналов и состояний объектов управления. Для построения моделей объектов управления и сигналов могут применяться методы идентификации и оценивания параметров. Модели объектов, кроме того, могут быть получены и с помощью теоретических выкладок. Недоступные измерению переменные состояния можно восстанавливать, используя методы теории наблюдателей или оценки состояния.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.