99 с., 84 рис., 78 табл., прил.: 3 листа А1.
Ключевые слова: ПЕРЕДАТОЧНАЯ ФУНКЦИЯ, КАНАЛ УПРАВЛЕНИЯ (РЕГУЛИРОВАНИЯ), КАНАЛ ВОЗМУЩЕНИЯ, РЕГУЛЯТОР, ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКА, АМПЛИТУДНО-ЧАСТОТНАЯ ХАРАКТЕРИСТИКА (АЧХ), ФАЗО-ЧАСТОТНАЯ ХАРАКТЕРИСТИКА (ФЧХ), АМПЛИТУДО-ФАЗОВАЯ ХАРАКТЕРИСТИКА (АФХ), РАСШИРЕННЫЕ ХАРАКТЕРИСТИКИ, УСТОЙЧИВОСТЬ, НАСТРОЕЧНЫЕ ПАРАМЕТРЫ, КОРНИ, ПОЛЮСА, СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ (САУ), КОЛЕБАТЕЛЬНОСТЬ, ВЕЩЕСТВЕННАЯ ЧАСТОТНАЯ ХАРАКТЕРИСТИКА.
Объектом исследования является анализ и синтез замкнутой системы автоматического управления.
Цель работы – освоение методов анализа и синтеза систем автоматического управления (САУ), приобретение практических навыков расчета различных систем.
Методы исследования: использование свойств преобразований Лапласа и Фурье, и обратные их преобразования. А также в ходе работы был использован персональный компьютер и следующее программное обеспечение: Microsoft Word, Microsoft Excel, MathCAD v14, MathType, Калькулятор.
В результате мы получили оптимальные настройки регулятора системы и доказали устойчивость системы при данных настройках.
Данный метод синтеза замкнутой системы автоматического регулирования находит место в химической промышленности и в тех областях промышленности, где имеются значительные запаздывания в объектах управления и возмущения.
Введение
В этом курсовом проекте перед нами была поставлена следующая задача: при известных свойствах объекта (количество каналов, передаточные функции каналов и их параметры), нужно синтезировать одноконтурную замкнутую систему автоматического управления, рассчитать ее параметры при заданном регуляторе и степени колебательности. При этом нужно проанализировать полученные результаты.
Данный курсовой проект необходим для овладения базовыми навыками расчета и синтеза ЗСАУ, которые пригодятся для расчета регулятора промышленной установки или другого реального объекта.
Исходные данные
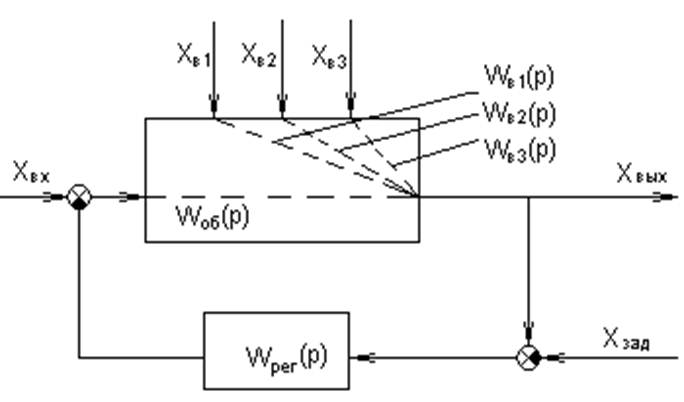
Дана структурная схема одноконтурной системы автоматического регулирования четырёхканального объекта регулирования и передаточные функции объекта по всем его каналам.
1. Канал регулирования:
- передаточная функция
- передаточный коэффициент (коэффициент усиления)
K = 1,5
- время запаздывания
t = 2
- коэффициенты передаточной функции
b1 =20
b2 =75
2. Канал возмущения 1:
- передаточная функция
- передаточный коэффициент (коэффициент усиления)
K = 1
- время запаздывания
t = 0
- коэффициент передаточной функции
b1 =1,5

3. Канал возмущения 2:
- передаточная функция
- передаточный коэффициент (коэффициент усиления)
K = 1
- время запаздывания
t = 0,5
- коэффициент передаточной функции
b1 =5
4. Канал возмущения 3:
- передаточная функция
- передаточный коэффициент (коэффициент усиления)
K = 1
- время запаздывания
t = 5
- коэффициент передаточной функции
b1 =32
b2 =400
a =5
t =5
Часть 1. Расчет системы автоматического управления
с ПИ – регулятором для объекта, обладающего
запаздыванием в канале регулирования
Этап 1. Анализ динамических свойств объекта
во временной и частотной областях
1.1. Канал регулирования.
- построение переходной функции

Так как запаздывание только сдвигает переходную функцию на время t, то вывод переходной функции будем делать для аналогичного звена без запаздывания, а «t» - учтем в окончательной формуле. Таким образом, передаточная функция объекта имеет вид:
Wоб(p)=Wоб0(p)×е-pt
Хвх(t)=1(t) – входной сигнал.
Изображение выходного сигнала имеет вид:

![]()
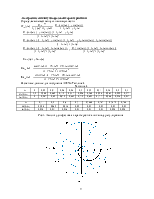
Рассмотрим характеристическое уравнение ![]() .
.
Найдем дискриминант: D = b12 - 4×b2 = 202 - 4×75 = > 0
Следовательно, корни характеристического уравнения действительные и разные:

Т.к. корни характеристического уравнения действительные и
разные, то полином можно разложить на множители ![]()
Выводим переходную функцию.
Разлагаем изображение на простые дроби:

Определяем коэффициенты А, В, С:
A×p2- A×р1p+ A×р1p2 - A×рp2+B×p2 - B×pр2 +C×p2-Срр1 = 1
при р2: А+В+С = 0
при р1: -A×р1 - A×р2 - В×р2 –Cр1 = 0
при р0: A р1p2= 1
Оригинал будет:
![]()
Подставим в оригинал выражения для А, В, С:
Учтем явление транспортного запаздывания, то есть при t ³ t переходная функция имеет вид:

При t < t h(t) = 0.
Расчетные данные для построения переходного процесса в Таблице 1
Таблица 1
|
t |
0 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
100 |
110 |
|
h(t) |
0 |
0 |
0,05 |
0,16 |
0,31 |
0,47 |
0,62 |
0,74 |
0,85 |
0,93 |
0,99 |
1,03 |
|
t |
120 |
130 |
140 |
150 |
160 |
170 |
180 |
190 |
200 |
210 |
220 |
|
h(t) |
1,05 |
1,06 |
1,06 |
1,06 |
1,05 |
1,04 |
1,03 |
1,02 |
1,01 |
1,01 |
1,00 |
Рис. 1 Переходная функция объекта по каналу регулирования
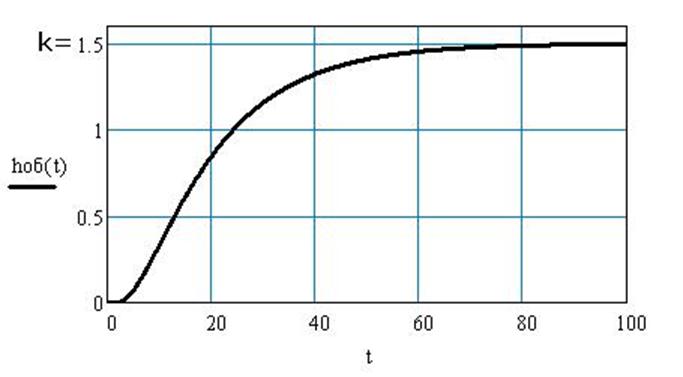
Так как звено колебательное, то переходный процесс носит не ярко выраженный колебательный характер. При окончании переходного процесса выходная величина выходит на установившееся значение, равное К=1,5. А так как передаточная функция включает в себя и передаточную функцию звена запаздывания, то переходная функция сдвигается вправо на величину запаздывания t = 2.
- построение амплитудно-частотной характеристики
Заменяем р = j×w

Находим выражение для АЧХ по каналу регулирования:
Расчетные данные для построения АЧХ в Таблице 2.
Таблица 2
|
w |
0 |
0,01 |
0,011 |
0,02 |
0,03 |
0,04 |
0,05 |
0,06 |
0,07 |
0,08 |
0,09 |
0,1 |
|
А(w) |
1 |
1,452 |
1,446 |
1,374 |
1,274 |
1,164 |
1,053 |
0,947 |
0,849 |
0,79 |
0,68 |
0,609 |
|
w |
0,11 |
0,12 |
0,13 |
0,14 |
0,15 |
0,16 |
0,17 |
0,2 |
0,5 |
0,6 |
0,65 |
0,69 |
|
А(w) |
0,547 |
0,491 |
0,443 |
0,399 |
0,361 |
0,327 |
0,297 |
0,225 |
0,027 |
0,016 |
0,012 |
0,01 |
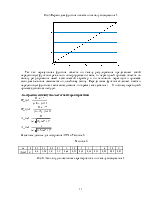
Рис.2 Амплитудно-частотная характеристика по каналу регулирования
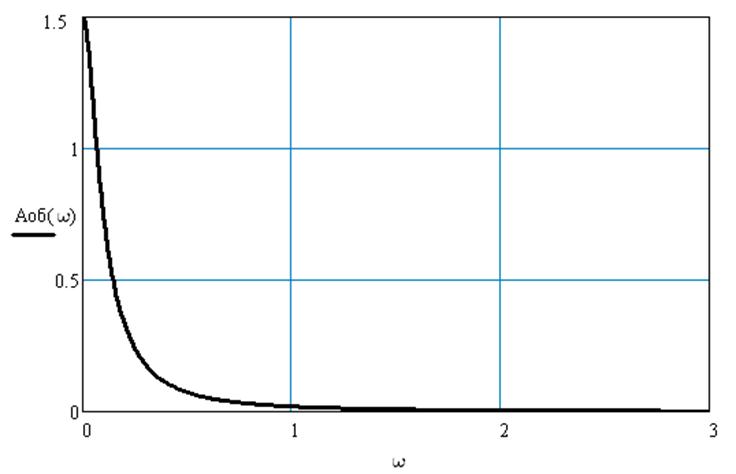
Объект по каналу регулирования является фильтром низких частот (т.е. хорошо пропускает низкочастотные воздействия и практически не пропускает высокочастотные).
- построение фазо-частотной характеристики

При 
 и
и 
Следовательно, при w ≤ 0,115
 ,
,
а при w > 0,115

Расчетные данные для построения ФЧХ в Таблице 3
Таблица 3
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.