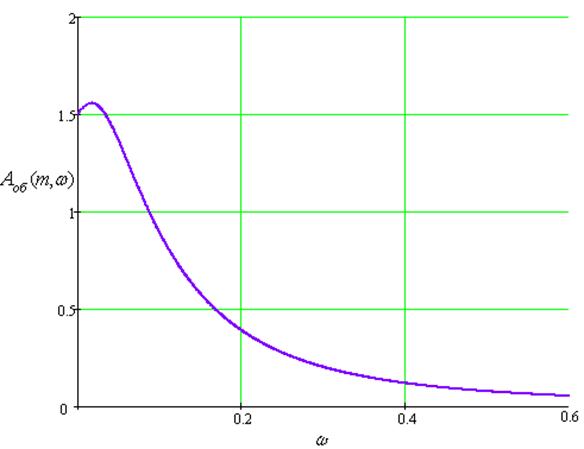
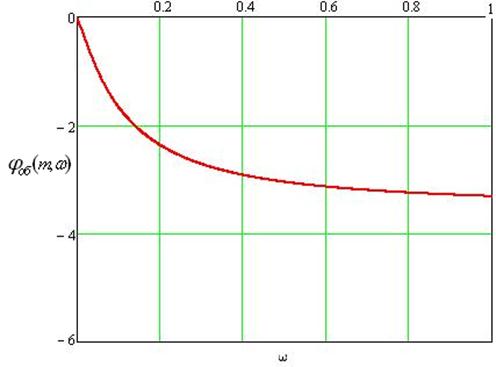
Расширенная фазо-частотная характеристика объекта по каналу регулирования
Выражение для расширенной фазо-частотной характеристики найдем как разность аргументов числителя и знаменателя:

Функция  имеет две точки разрыва, в которых
функция arctg изменяется с p/2 до -p/2, однако нас интересует поведение функции
при положительном значении частоты ω. Чтобы найти эти точки, необходимо
приравнять знаменатель функции
имеет две точки разрыва, в которых
функция arctg изменяется с p/2 до -p/2, однако нас интересует поведение функции
при положительном значении частоты ω. Чтобы найти эти точки, необходимо
приравнять знаменатель функции ![]() к нулю.
к нулю.

Для обеспечения непрерывности графика РАФХ необходимо прибавить период, равный -p:
 при
при 
 при
при
Расчетные данные для построения РФЧХ в Таблице 43. Расширенная ФЧХ проходит ниже обыкновенной ФЧХ.
Таблица 43
|
w |
0 |
0,005 |
0,01 |
0,03 |
0,07 |
0,1 |
0,3 |
0,7 |
1 |
3 |
|
j(m,w) |
0 |
-0,101 |
-0,204 |
-0,617 |
-1,302 |
-2,083 |
-2,721 |
-3,202 |
-3,316 |
-3,491 |
2.2. Построение кривой равной степени колебательности m=0,221 для объекта без запаздывания и выбор оптимальных, левых и правых настроечных параметров регулятора.
Для реализации задачи синтеза САУ необходимо в плоскости настроек ПИ – регулятора построить кривую равной степени колебательности и на ней выбрать точку, соответствующую минимуму квадратичной интегральной оценки качества. Эта точка обычно находится при wопт = 1.3 . wmax , где wmax – значение частоты w в максимуме графика S0(S1).
Чтобы заданная система имела переходный процесс с заданной степенью колебательности m нужно, чтобы РАФХ заданной системы проходила через точку с координатами (-1, j·0), т.е.:
При этом степень колебательности будет равна m. Из этих условий найдем настройки пропорционально-интегрального регулятора. Для этого в передаточной функции регулятора сделаем подстановку: p=-m·w+j·w,:

Представим передаточную функцию объекта в показательном виде:
Используя уравнение Эйлера, получим:

Поскольку
передаточную функцию разомкнутой системы можно представить в виде произведения
передаточных функций объекта и регулятора ![]() ,
следовательно, передаточную функцию разомкнутой системы можно также представить
в показательном виде. В свою очередь, условия устойчивости по критерию
Найквиста представим в показательной форме, то есть мы можем составить систему
из двух уравнений:
,
следовательно, передаточную функцию разомкнутой системы можно также представить
в показательном виде. В свою очередь, условия устойчивости по критерию
Найквиста представим в показательной форме, то есть мы можем составить систему
из двух уравнений:

Можно получить область, где находятся значения настроечных параметров S0, S1, w.
Решая систему уравнений, найдем настройки пропорционально-интегрального регулятора
Решение этой системы для S0, S1 :
Используя полученные уравнения настроек регулятора, и задавая различные значениям w, получим кривую заданной степени колебательности m=0,221:
Расчетные данные для построения кривой равной степени колебательности в Таблице 44
Таблица 44
|
w max |
w лев |
w опт |
w прав |
|||||||||
|
w |
0 |
0,03 |
0,05 |
0,1 |
0,2 |
0,39829 |
0,45 |
0,48438 |
0,51777 |
0,54937 |
0,55 |
0,6 |
|
S1 |
-0,667 |
-0,451 |
-0,265 |
0,349 |
2,219 |
8,45 |
10,627 |
12,2 |
13,825 |
15,45 |
15,484 |
18,232 |
|
S0 |
0 |
0,012 |
0,032 |
0,117 |
0,374 |
0,754 |
0,72 |
0,647 |
0,532 |
0,377 |
0,374 |
0,028 |

Так как объект по каналу регулирования является статическим, то кривая равной степени колебательности выходит из отрицательной области настройки S1.
Оптимальные настройки ПИ-регулятора, обеспечивающие при заданной степени колебательности минимизацию квадратичной интегральной оценки переходного процесса в замкнутой системе, определяются как координаты точки, лежащей на правой ветви кривой S0-S1 вблизи ее вершины. Найти положение этой точки без расчета квадратичной интегральной оценки можно, используя знания о том, что в точке с оптимальными настройками значение частоты составляет примерно на (20—30)% больше частоты в точке максимума кривой S0-S1.
Согласно графику:
wmax = 0,39829 => wопт = 1.3wmax = 1.3·0,39829 = 0,51777
Находим оптимальные настройки ПИ-регулятора:
S0опт = S0(m,wопт) = 0,532
S1опт = S1(m,wопт) = 13,825
w лев = 0,0,48438
S0лев = S0(m,wлев) = 0,647
S1лев = S1(m,wлев) = 12,2
w прав = 0,54937
S0прав = S0(m,wправ) = 0,377
S1прав = S1(m,wправ) = 15,45
Этап 3. Анализ замкнутой САУ с тремя парами настройками регулятора.
3.1 Построение амплитудно-фазовой характеристики разомкнутой системы и определение запаса устойчивости системы по модулю и по фазе
Передаточную функцию разомкнутой системы можно представить в виде произведения передаточных функций объекта и регулятора:
![]()
Для построения АФХ разомкнутой системы необходимо знать АФХ используемого регулятора. Поскольку мы рассчитываем систему с ПИ – регулятором, то сначала рассчитаем его частотные характеристики.


Для получения вещественной и мнимой частотных характеристик разомкнутой системы надо числитель и знаменатель выражения частотной передаточной функции помножить на число, сопряженное со знаменателем и упростить полученное выражение. Как было найдено ранее вещественная и мнимая характеристики разомкнутой системы при учете τ=0 выражаются:
Используя полученные уравнения вещественной и мнимой частотных характеристик, и задаваясь различными значениями w, получим амплитудно-фазовую характеристику разомкнутой системы. Определим запас устойчивости по модулю и фазе.
Рис.47. АФХ разомкнутой системы с оптимальными настройками иt =0
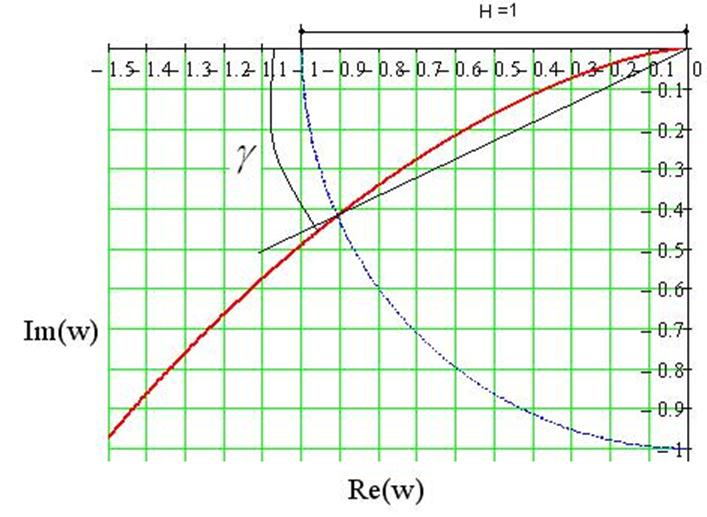
При оптимальных настройках: H=1, g =24°74'
Для нахождения амплитудно-фазовой характеристики разомкнутой системы для левых настроек ПИ-регулятора выполним последовательность вычислений, аналогично приведенным выше.
Рис.48. АФХ разомкнутой системы с настройками, расположенными левее оптимальных, и t =0
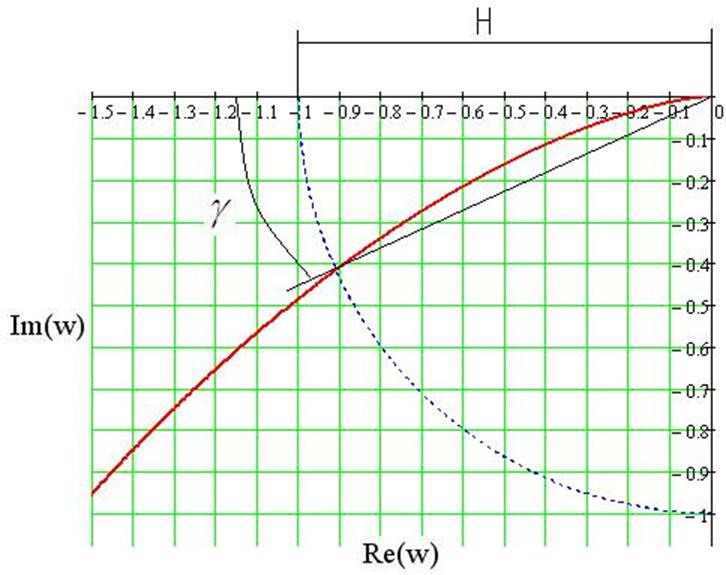
При настройках левее оптимальных: H=1, g =24°53'
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.