Доминирующими полюсами являются П1 П2, П5. Уменьшение амплитуды колебательной составляющей, создаваемое комплексными полюсами П1 и П5 зависит от модуля вещественной составляющей этих полюсов. Время регулирования переходной характеристики зависит от абсолютного значения вещественной части доминирующих полюсов, наибольшее значение из доминирующих полюсов оказывает П2. Полюса П3, П4 оказывают малое влияние из-за удаленности от мнимой оси.
Время регулирования переходной характеристики также зависит от ноля Н6, который оказывает сильное влияние. Время регулирования переходной характеристики также зависит от нулей Н7, Н8, Н9. Ноль Н6 оказывает существенное влияние. Нули Н7, Н8, Н9 не оказывает существенного влияния из-за удаленности от мнимой оси.
Часть 3. Расчет системы автоматического управления
с И – регулятором и с П – регулятором для объекта,
не обладающего запаздыванием в канале регулирования
Этап 1. Анализ динамических свойств объекта,
не обладающего запаздыванием в канале регулирования,
во временной и частотной областях
Анализ динамических свойств объекта управления во временной и частотной областях по каналу регулирования и по трем каналам возмущения выполнен в первом этапе второй части пояснительной записки.
Этап 2. Синтез замкнутой САУ с И - регулятором и с П – регулятором
на заданную степень колебательности m=0,221
для объекта без запаздывания в канале регулирования
2.1 Расширенные частотные характеристики объекта управления по каналу регулирования
Синтез замкнутой САУ осуществляется методом расширенных частотных характеристик. Для определения расширенных частотных характеристик объекта по каналу регулирования необходимо в передаточной функции объекта сделать подстановку: p=-m·w+j·w, где m=0.221-заданная степень колебательности системы. Передаточная функция по каналу регулирования имеет вид:
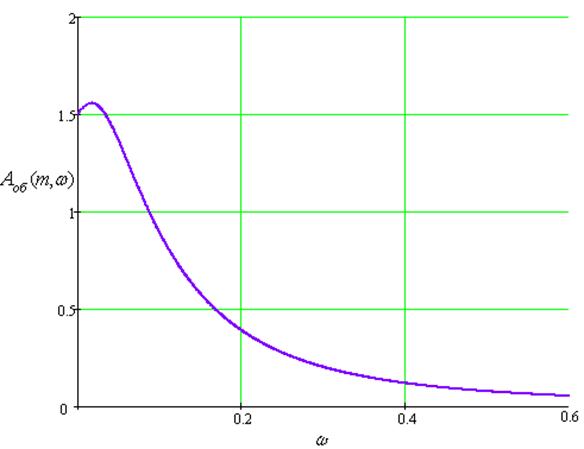
- расширенная амплитудно-частотная характеристика объекта по каналу регулирования
Выражение для расширенной амплитудно-частотной характеристики найдем как отношение модулей числителя и знаменателя:

Расширенная АЧХ проходит выше обыкновенной АЧХ.
Расчетные данные для построения РАЧХ в Таблице 45.
Таблица 45
|
w |
0 |
0,005 |
0,01 |
0,03 |
0,04 |
0,05 |
0,1 |
0,2 |
0,3 |
0,5 |
1 |
|
A(m,w) |
1,5 |
1,529 |
1,548 |
1,523 |
1,456 |
1368 |
0,895 |
0,392 |
0,203 |
0,078 |
0,02 |
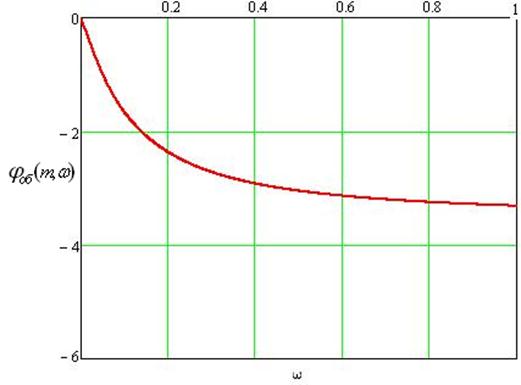
Рис.63 Расширенная амплитудно-частотная характеристика по каналу регулирования со степенью колебательности m=0,221 и без запаздывания.
- расширенная фазо-частотная характеристика объекта по каналу регулирования
Выражение для расширенной фазо-частотной характеристики найдем как разность аргументов числителя и знаменателя:

Функция  имеет две точки разрыва, в которых
функция arctg изменяется с p/2 до -p/2, однако нас интересует поведение функции
при положительном значении частоты ω. Чтобы найти эти точки, необходимо
приравнять знаменатель функции
имеет две точки разрыва, в которых
функция arctg изменяется с p/2 до -p/2, однако нас интересует поведение функции
при положительном значении частоты ω. Чтобы найти эти точки, необходимо
приравнять знаменатель функции ![]() к нулю.
к нулю.

Для обеспечения непрерывности графика РАФХ необходимо прибавить период, равный -p:
 при
при 
 при
при
Расчетные данные для построения РФЧХ в Таблице 46. Расширенная ФЧХ проходит ниже обыкновенной ФЧХ.
Таблица 46
|
w |
0 |
0,005 |
0,01 |
0,03 |
0,07 |
0,1 |
0,3 |
0,7 |
1 |
3 |
|
j(m,w) |
0 |
-0,101 |
-0,204 |
-0,617 |
-1,302 |
-2,083 |
-2,721 |
-3,202 |
-3,316 |
-3,491 |
2.3. Построение кривой равной степени колебательности m=0,221 для объекта без запаздывания и выбор оптимальных настроечных параметров И - регулятора и П – регулятора.
Для реализации задачи синтеза САУ необходимо в плоскости настроек И – регулятора и в плоскости настроек П – регулятора построить кривую равной степени колебательности и на ней выбрать точку, соответствующую минимуму квадратичной интегральной оценки качества. Эта точка обычно находится при wопт = 1.3 . wmax , где wmax – значение частоты w в максимуме графика S0(S1).
Чтобы заданная система имела переходный процесс с заданной степенью колебательности m нужно, чтобы РАФХ заданной системы проходила через точку с координатами (-1, j·0), т.е.:
При этом степень колебательности будет равна m. Из этих условий найдем настройки пропорционально-интегрального регулятора. Для этого в передаточной функции регулятора сделаем подстановку: p=-m·w+j·w,:
Представим передаточную функцию объекта в показательном виде:
Используя уравнение Эйлера, получим:

Поскольку
передаточную функцию разомкнутой системы можно представить в виде произведения
передаточных функций объекта и регулятора ![]() ,
следовательно, передаточную функцию разомкнутой системы можно также представить
в показательном виде. В свою очередь, условия устойчивости по критерию
Найквиста представим в показательной форме, то есть мы можем составить систему
из двух уравнений:
,
следовательно, передаточную функцию разомкнутой системы можно также представить
в показательном виде. В свою очередь, условия устойчивости по критерию
Найквиста представим в показательной форме, то есть мы можем составить систему
из двух уравнений:

Можно получить область, где находятся значения настроечных параметров S0, S1, w.
Решая систему уравнений, найдем настройки интегрального регулятора
и пропорционального регулятора.
Настройки И – регулятора:
Настройки П – регулятора:
Используя полученные уравнения настроек И – регулятора и П - регулятора, и задавая различные значениям w, получим кривую заданной степени колебательности m=0,221.
Расчетные данные для построения кривой равной степени колебательности с И – регулятором и с П – регулятором в Таблице 47
Таблица 47
|
w |
0 |
0,03 |
0,05 |
0,1 |
0,2 |
0,39829 |
0,45 |
0,51777 |
0,55 |
0,6 |
|
S1 |
-0,667 |
-0,451 |
-0,265 |
0,349 |
2,219 |
8,45 |
10,627 |
13,825 |
15,484 |
18,232 |
|
S0 |
0 |
0,012 |
0,032 |
0,117 |
0,374 |
0,754 |
0,72 |
0,532 |
0,374 |
0,028 |
Оптимальные настройки для И – регулятора S0опт = S0(m,wопт) = 0,067
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.