Кинематическая ошибка (КО) в линии, не связанная с мертвым ходом, зависит от кинематических ошибок отдельных передач и представляет собой их алгебраическую сумму. В каждой отдельной передаче кинематические ошибки возникают из-за эксцентриситетов и изменяются по синусоидальному закону. В поводковой муфте эксцентриситетом является смещение осей вращения ведущего и ведомого поводков. В зубчатых передачах эксцентриситетом является смещение центра окружности зубчатого венца колеса относительно оси вращения валика, на котором зубчатое колесо закреплено.
На рис. 4 кривыми 1 и 2 показаны графики ошибок Δϕ+ и Δϕ− двухступенчатого редуктора при различных значениях ϕ.
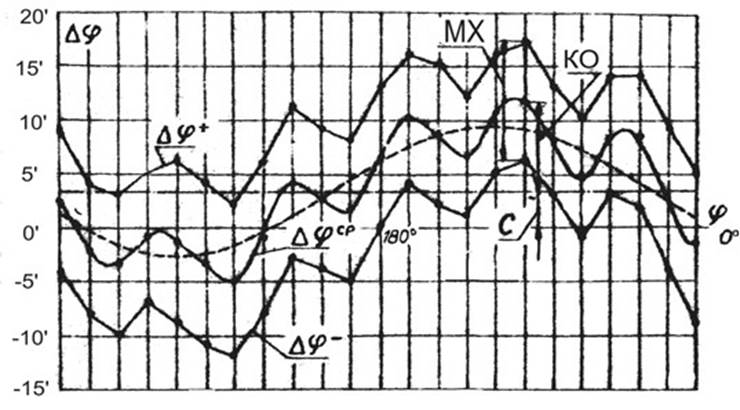
Рис. 4. График ошибок кинематической линии
Наличие периодических колебаний связано с влиянием эксцентриситетов. Среднее значение
Δϕср = ![]() (Δϕ
ϕ+
+ Δ −)
(3) включает в себя:
(Δϕ
ϕ+
+ Δ −)
(3) включает в себя:
а) кинематическую ошибку (КО) линии при соединениях звеньев
без зазоров или ошибку, не связанную с мертвым ходом;
б) ошибку (С) рассогласования начальных положений ведущего
звена ϕ1 и ведомого звена ϕ2 .
Величина С находится как среднее значение ошибок Δϕср , определяемых для достаточного числа положений механизма:
1 n ср
С
= ![]() ∑Δϕi , (4)
∑Δϕi , (4)
n i=1
где n - число положений механизма;
Δϕiср = ![]() (Δϕ
ϕi+
+ Δ i−)
- среднее значение кинематических ошибок Δϕi+
и Δϕi−
линии в i-м положении механизма. КО линии, не связанная с МХ
в каждом положении механизма, определится разностью:
(Δϕ
ϕi+
+ Δ i−)
- среднее значение кинематических ошибок Δϕi+
и Δϕi−
линии в i-м положении механизма. КО линии, не связанная с МХ
в каждом положении механизма, определится разностью:
КОi = Δϕiср −С . (5)
Определение МХ, КО и величины рассогласования С простой кинематической линии и является задачей настоящей лабораторной работы.
Исследуемая кинематическая линия подключена к шпинделю делительной головки, как показано на рис. 2. Она состоит из двухступенчатого редуктора с зубчатыми колесами Z1, Z2 , Z2′ и Z3 и поводковой муфты 11-12. Ведущим звеном является валик с зубчатым колесом Z1 и отсчётным барабаном 13. Его положение через один оборот фиксируется по риске указателя 14. Ведомым звеном является поводок 11 и его положение определяется показаниями шкалы делительной головки.
Значения теоретических углов ϕ поворота поводка 15 за каждый полный поворот отсчётного барабана 13 приведены в табл. 1. Для их подсчёта известны: цена оборота поводка 11 A11 = 360°; числа зубьев колес: Z1 = 33,
Z2 =132,
Z2′ = 24,
Z3 =132.
Цену оборота А13 ведомого вала находим по передаточному отношению
![]()
![]()
![]() A11 A11 Ζ1Ζ′2 i1 3− = ; A13 = = A11 .
A11 A11 Ζ1Ζ′2 i1 3− = ; A13 = = A11 .
A13 i1 3− Ζ2Ζ3
Подставляя заданные значения, получим:
A ′′,
′′,
т. е. за один оборот отсчётного барабана 13 поводок 11 должен повернуться на угол 16 22° ′. Нарастающая сумма этих углов поворота и даёт теоретические значения углов ϕ поворота поводка 11.
В работе необходимо замерить и внести в таблицу действительные значения углов ϕ∂ через каждый оборот отсчётного барабана 13 при движении в сторону увеличения угла ϕ (22 позиции замеров) и затем при обратном движении – в сторону уменьшения угла ϕ. В таблице значения этих углов обозначены ϕ+ и ϕ− соответственно.
Затем рассчитываются ошибки Δϕ+ и Δϕ− кинематической линии при прямом и обратном движении (для 22 позиций) по формуле (1), мёртвый ход МХ линии – по формуле (2), величина С рассогласования начальных значений угла ϕ на барабане 13 и поводке 11 по формуле (4) и кинематическая ошибка КО, не связанная с мёртвым ходом, по формуле (5).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.