Оптический лимб представляет собой стеклянное кольцо с нанесенными по окружности делениями (360 делений, цена деления – 1°). Он укреплён на шпинделе внутри корпуса. Шпиндель 1 вращается совместно с лимбом 4 и с червячным колесом 2 от червяка 3, который связан с маховиком 10 и маховичком точной наводки 9 (рис. 2).
По оси шпинделя расточено коническое отверстие (конус Морзе № 4), в которое вставляется оправка или центр с поводком, служащие для крепления деталей.
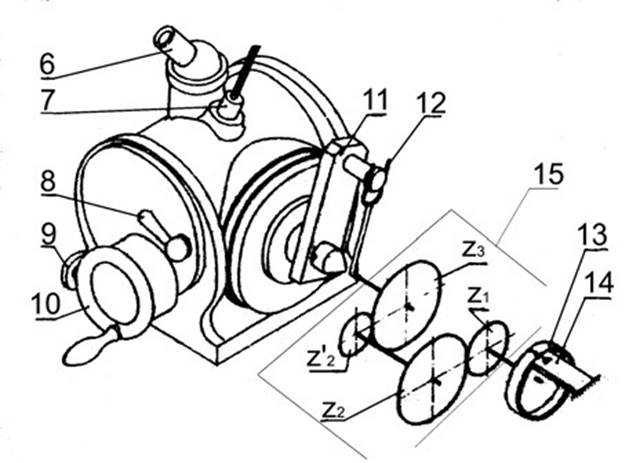
Рис. 2. Вид ОДГ и схема редуктора:
6 - окуляр, 7 - лампа осветительная, 8 - стопор, 9 - маховичок точной наводки, 10 - маховик червяка, 11 - поводок шпинделя, 12 - поводок редуктора, 13 - отсчётный барабан, 14 - указатель, 15 - двухступенчатый зубчатый редуктор
Отсчет углов поворота шпинделя производится с помощью отсчётного микроскопа. Окуляр 6 (рис. 1) микроскопа поворачивается вокруг вертикальной оси в положение, наиболее удобное для наблюдений. В поле зрения окуляра (рис. 3) видны крупные (градусные) и мелкие (минутные) деления лимба 4. Градусные деления перемещаются в поле зрения при вращении шпинделя делительной головки. Минутные деления от 0 до 60 нанесены на окулярной сетке 5 (рис. 1), неподвижно установленной в фокальной плоскости окуляра 6. Точность отсчёта ограничивается ценой деления окулярной сетки, равной минуте. На рис. 3 показаны градусные и минутные деления, видимые в поле зрения микроскопа в положении шпинделя, при котором отсчет равен 45 23° ′.
Шкала освещается электролампой 7 (рис. 3). Шпиндель после установки на нулевой угол может фиксироваться стопором 8 (рис. 2).
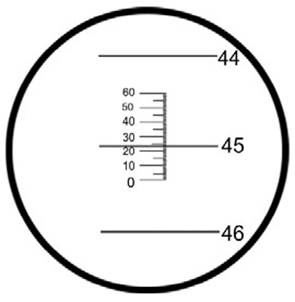
Рис. 3. Вид поля зрения отсчётного микроскопа
Ошибкой Δϕ простой кинематической линии, состоящей из последовательно включенных передач, называется разница положений ведомого звена действительного и теоретического механизмов.
При угле ϕ1, определяющем положение ведущего звена 1, ведомое звено 2 должно занимать теоретическое положение ϕ2 , а в действительном механизме положение звена 2 определяется углом ϕ2∂. В этом случае ошибка линии Δϕ=ϕ ϕ2∂ − 2 . Если опустить индекс звена 2, то можно написать:
Δϕ=ϕ ϕ∂ − , (1)
где ϕ∂ - положение ведомого звена действительного механизма; ϕ - положение ведомого звена теоретического механизма.
Положение ведомого звена, определяемого углами ϕ∂ , ϕ, и ошибка Δϕ могут определяться как в угловых единицах (радианы, угловые минуты, градусы), так и в других отсчётных единицах (о.е.) величины, передаваемой прибором. Связь угловой ошибки Δϕ в радианах с ошибкой Δо е. в отсчётных единицах выражается зависимостью
Δо е. =
![]() A, где А - цена оборота вала в отсчётных
единицах.
A, где А - цена оборота вала в отсчётных
единицах.
Ошибка Δϕ возникает, главным образом, от зазоров в кинематических парах и от эксцентриситетов – смещений осей зубчатых колёс, валов, поводковых муфт и других элементов передач. Кроме того, упругие и тепловые деформации, износ звеньев и некоторые другие причины могут вызывать ошибку Δϕ. Во многих случаях влиянием последних факторов можно пренебречь. Влияние зазоров в кинематических парах и эксцентриситетов на ошибку кинематической линии рассмотрим подробнее.
При изменении направления сил, действующих на ведомое звено, или при перемене движения механизма с одного направления на противоположное происходит изменение значений ошибки Δϕ за счёт зазоров в кинематических парах. Разница значений ошибки Δϕ, возникающая за счёт зазоров с изменением направления действующих сил при одном и том же положении ведущего звена, называется мертвым ходом (МХ) механизма:
МХ = Δϕ+ − Δϕ− , (2) где Δϕ+ - кинематическая ошибка линии при действии на ведомое звено силы +Р в сторону увеличения значений ϕ;
Δϕ− - кинематическая ошибка линии при действии на ведомое звено силы –Р в сторону уменьшения значений ϕ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.