Современные системы автоматического управления нашли самое широкое применение в различных областях народного хозяйства [6]. Это связано не только с необходимостью автоматизации различных технологических процессов и производственных операций, но и с появлением принципиально новых автоматизированных машин, предназначенных для работы в экстремальных условиях: в космосе, под водой, в зонах с ядерным излучением, в шахтах, в агрессивных средах и т.п.
Высокие требования, предъявляемые к динамическим характеристикам систем автоматического управления, обуславливают необходимость учитывать при их проектировании влияние зазоров и упругих деформаций, сухого и вязкого трения в силовом редукторе, переменность моментов инерции нагрузки, внешние возмущения и т.д. Это особенно важно для автоматических систем большой мощности и систем со многими степенями свободы.
Таким образом, специфика объекта регулирования выдвигает ряд новых проблем при проектировании автоматических систем.
Из всего многообразия систем автоматического регулирования в данном курсе выделяется лишь класс следящих систем, при этом общие вопросы проектирования рассматриваются на конкретных примерах, что, не нарушая общности выводов, позволяет изложить инженерные методики проектирования современных, сложных по своей структуре, высококачественных следящих систем.
Проектирование современных систем автоматики немыслимо без применения цифровой и аналоговой техники [7]. Этим вопросам в настоящем курсе также уделяется должное внимание. Важным этапом проектирования является синтез структурной схемы следящей системы, выбор и согласование необходимых элементов и их параметров, оценка статической и динамической точности системы, определение необходимости введения коррекции, расчет корректирующих устройств.
Классификация следящих систем приведена на рисунке 2.7
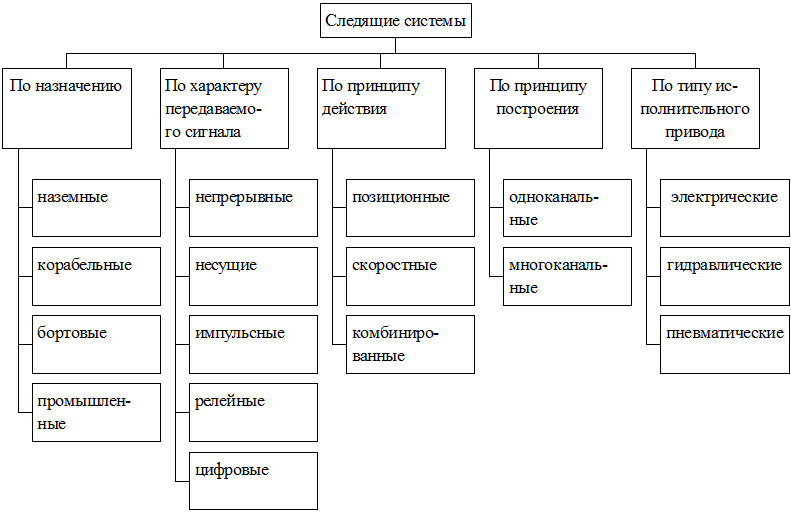
Рисунок 2.7 – Классификация следящих систем
При проектировании СС можно выделить следующие основные части: прибор формирования сигнала ошибки, который включает в себя измерительные элементы и редуктор, усилительные и преобразующие устройства: исполнительные элементы с усилителями мощности; механические передачи и вспомогательные элементы или устройства. Структурная схема ЭМС, согласно которой осуществляется синтез в курсовом проектировании, приведена на рисунке 2.8 (обозначения на рисунке: ДМ – демодулятор, КУ – корректирующее устройство, М – модулятор, ПОК – предоконечный каскад, УМ – усилитель мощности, ИУ – исполнительное устройство, Р - редуктор).
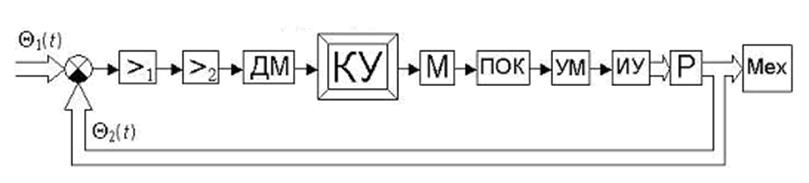
Рисунок 2.8 – Структурная схема ЭМС
Основные задачи проектирования состоят в выявлении требуемых динамических свойств следящих систем, определения их типа (электрическая, гидравлическая, пневматическая СС), в выборе исполнительного двигателя, обладающего нужными предельными динамическими возможностями, определении метода управления и разработке схемы управления, которая при максимальной простоте и надежности и минимальных габаритах и весе обеспечивает необходимую динамику и точность.
Проектирование – процесс творческий и готовых рецептов дать невозможно. Успех зависит от многих объективных и субъективных причин и, в свою очередь, от квалификации проектировщика. Важным этапом проектирования является осмысливание функций, выполняемых всей системой управления, определение задач, возлагаемых на следящую систему, и влияние ее свойств на свойства всей системы, а также выявление всех управляющих и возмущающих воздействий на следящую систему и условий ее работы. В результате должна быть получена количественная оценка требуемых динамических свойств, обеспечивающих решение поставленной задачи.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.