|
|
где Ev(Y) и Eg(Y) – функции потерь Эрланга (g = V - W).
При использовании обходных маршрутов, состоящих из двух ветвей, d=1/2. Если применяются обходные маршруты, состоящие из трех ветвей, то для них d = 1/3 и т. д. Величина g называется порогом ограничения для транзитной нагрузки. Если число занятых каналов на ветви равно или больше порога g, то транзитный вызов, поступающий на эту ветвь, получает отказ в обслуживании.
Эффективность применения на сети динамического и статического способов управления путями передачи потоков в значительной степени зависит от поступающей на ветви сети нaгpyзки.
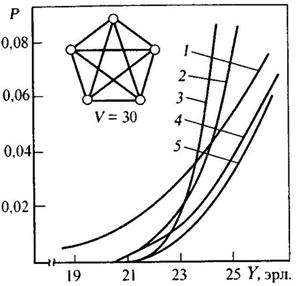
Рис.7.7 Зависимость P от Y при разных способах управления потоками вызовов
В качестве примера рассмотрим зависимости вероятности потерь по вызовам P от значения первичной, поступающей на каждую ветвь сети, нагрузки Y при различных способах управления (puc.7.7). При этом рассматривается пятиузловая полносвязная сеть, каждая пара узлов которой соединена двусторонним пучком каналов емкостью V = 30. Кривая 1 соответствует случаю, когда вызовы обслуживаются только по прямым путям без применения обходных, и построена по первой формуле Эрланга. Кривая 2 соответствует статическому, а кривая 3 — динамическому способу управления. На рис.7.7 также приведены результаты для случаев применения на данной сети резервирования каналов в сочетании со статическим (кривая 4) и динамическая (кривая 5) управлением.
Анализируя приведенные зависимости, можно отметить следующее. Способ обслуживания вызовов только по прямым путям является, как говорят, не критичным к увеличению нагрузки, так как при этом способе каждый вызов занимает только один канал при любой нагрузке. Статическое и динамическое управление при малых поступающих нагрузках позволяют снизить потери вызовов на сети по сравнению со способом обслуживания только по прямым путям. Однако по мере роста нагрузки, начиная с некоторого ее критического значения, использование обходных направлений становится нежелательным, поскольку приводит к большим потерям вызовов на сети, чем при способе обслуживания только по прямым путям. Это справедливо при статическом и динамическом управлении. Если при малых нагрузках (когда большинство вызовов обслуживается по прямым маршрутам, а число транзитных соединений невелико) применение обходных направлений повышает пропускную способность сети, то с ростом нагрузки возрастает число вызовов, направляемых для обслуживания на обходные маршруты. Каждый из этих вызовов занимает две и более ветви сети, в результате чего происходит как бы насыщение сети, и в целом ее пропускная способность снижается. При больших нагрузках динамическое управление менее эффективно, чем статическое. В этом случае при динамическом управлении чаще, чем при статическом, происходит выбор обходных направлений с большим числом транзитных участков (три и более ветви), следовательно, снижается пропускная способность сети в целом. Кривые 4 и 5 (см. рис.7.7) свидетельствуют о том, что резервирование каналов на ветвях сети для приоритетного обслуживания основной нагрузки в сочетании с обходными направлениями — эффективное средство борьбы с перегрузкой сети. Как показали исследования, вероятность потерь на сети с обходными маршрутами и резервированием каналов при любой поступающей нагрузке всегда меньше, чем в случае применения способа обслуживания вызовов только по прямым путям.
При использовании на сети способов управления путями передачи потоков необходимо задавать количество допустимых обходных маршрутов, а также допустимое число ветвей в каждом маршруте. Как следует из вышеописанного, применение на сети большого числа обходных направлений, состоящих из трех и более ветвей, при увеличении поступающей нагрузки может привести к снижению пропускной способности сети. Исследования, проведенные применительно к условиям функционирования сети железнодорожного транспорта, показали, что при статическом и динамическом управлении необходимо использовать не более трех обходных направлений, причем число ветвей в каждом из них должно быть не более двух. Обязательным в этом случае является применение резервирования каналов для обслуживания основной нагрузки.
Помимо резервирования каналов на сети может быть применен и другой способ управления объемом потоков вызовов — ограниченное ожидание обслуживания. В этом случае при отсутствии свободных каналов в пучке поступающий вызов не теряется, а устанавливается на ограниченное ожидание момента освобождения канала. Ограничено может быть число мест ожидания или время ожидания в очереди на обслуживание. В АТС и УАК с программным управлением наиболее приемлема система обслуживания вызовов с двойным ограничением, когда время ожидания ограничено постоянной величиной t при фиксированной длине очереди на обслуживание r. Введение ограничения на длину очереди необходимо из-за ограниченных технических возможностей оборудования АТС и УАК. Ограничивать время ожидания необходимо для уменьшения дополнительной нагрузки на соединительные линии и приборы АТС и УАК. В такой системе обслуживания вновь поступивший вызов при отсутствии свободных каналов в направлении "устанавливается в очередь" только в том случае, если есть свободные места для ожидания. Вызов принудительно удаляется из системы, а абоненту посылается сигнал Занято, если время ожидания этого вызова в очереди достигло величины t, и в данный момент времени нет свободных каналов в требуемом направлении связи.
Приоритетность в обслуживании вызовов в системе с ограниченным ожиданием осуществляется, например, если вызовам, поступающим на обходное направление, запрещается занимать места ожидания. Исследования показали, что при использовании системы обслуживания вызовов с ограниченным ожиданием на сети железнодорожного транспорта необходимо для каждой включенной в узлы коммутации ветви сети предусмотреть четыре - пять мест для ожидания. Длительность ожидания в очереди на обслуживание должна быть не более 15 с. При таких условиях пропускная способность сети железнодорожного транспорта может быть повышена в среднем на 14—17 %.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.