Hε0(x1,...,xn) =![]() . (2)
. (2)
Пусть при заданном допустимом уровне вероятности (1) выхода годных изделий Рг доп для распределения W0 (х1,..., хn) выполняется при условии Рг < Рг доп . Тогда для части параметров 0 < ℓ< n вводятся контрольно-регулировочные операции, а для остальной части параметров (n - ℓ) увеличивается (или оставляется прежней) точность производства продукции ( услуги). При этом формируется новое (апостериорное) распределение вероятностей Wa = (x1,x2,...,xn)при некотором Рга >Рг доп с соответствующей апостериорной энтропией Hap верхняя граница, которой определятся выражением [4]:
 (з)
(з)
где Hak(xi),Hат(xi) апостериорные значения энтропии контролируемых и неконтролируемых параметров, соответственно. Знак равенства в (3) выполняется для статически независимых параметров.
Значение сумм в правой части (3)
характеризует остаточную неопределенность ![]()
значений параметров изделия, возникающих из-за погрешностей контрольно - регулировоч-но операций и конечной технологической точности изготовления. В свою очередь остаточная неопределенность (3) не должна превышать некоторое допустимое значение [2] энтропии
 , (4)
, (4)
где первая сумма определятся допустимым уровнем ошибок I и II рода (4) (αдоп , βдоп соответственно) при контроле 0 ≤ ℓ ≤ n параметров; вторая сумма - допустимым значениям вероятности брака за счет неконтролируемых (n-ℓ) параметров.
Очевидно, что вероятность брака Рб = βнк за счет неконтролируемых параметров является дополнительной составляющей общей ошибки II рода β (риска изготовителя). Тогда необходимо, чтобы выполнялось условие
β = βk + βнк ≤ βдоп . (5)
Остаточная энтропия равна условной энтропии [3], тогда выражение (3) перепишется в виде
 (6)
(6)
где ![]() ,
, ![]() - дисперсии параметра xiи аддитивной ошибки уiсоответственно (при гауссовых распределениях х, у).
- дисперсии параметра xiи аддитивной ошибки уiсоответственно (при гауссовых распределениях х, у).
Количество информации, получаемой при контроле 0 < ℓ < n параметров, равно [4] с учетом выражений (2),(3) и (6)
 . (7)
. (7)
При функции стоимости С информации, необходимой для измерения параметра х, стоимости потерь из-за ошибок I и II рода - Сαi, Сβi, стоимости потерь на брак - Cбi, можно составить общую функцию потерь
 .
.
Здесь Ii - количество информации при контроле i - го параметра;  ,
,
Рбi, - вероятность брака по i - тому (неконтролируемому параметру).
Таким образом, получена функция потерь (8), позволяющая решить задачу оптимизации выбора контролируемых параметров по критерию минимума затрат (потерь), с учетом погрешности измерения и точности изготовления, а также при обеспечении условий (4) и (5).
Однако необходимо отметить, что для применения функции потерь (8) требуется знание зависимости Cik (I), которая в общем случае имеет нелинейный характер [1,3].
Полученные выше условия (3) и (4) ограничения числа контролируемых параметров снимают неопределенность условия ограничения числа параметров, предлагаемого в работе [5], что позволяет применять предложенный в данной статье подход на стадии определения номенклатуры параметров изделия.
4 Оценка оптимальности требований к точности измерений.
2.3.1 СЛУЧАЙ АДДИТИВНОЙ ПОГРЕШНОСТИ
Измеренная величина представляется следующей моделью:
Z(t) = Uс(t) + Y(t), (2.1)
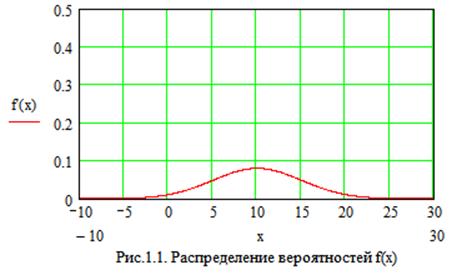
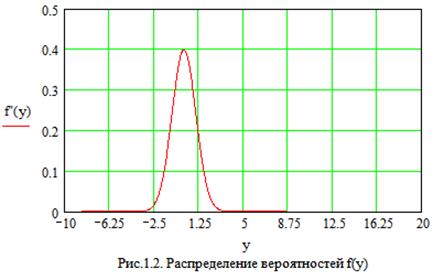
где Uc(t) - истинное значение измеряемого сигнала, Y(t) - аддитивная случайная погрешность, в общем случае зависящие от времени и распределённые по нормальному закону с плотностями вероятности f(x) и f(y) соответственно.
 Суммарная функция затрат имеет вид:
Суммарная функция затрат имеет вид:
![]() ,
(2.2)
,
(2.2)
где KU - коэффициент затрат на измерение; Kα и Kβ - коэффициенты затрат на потери из-за ошибок α и β; αср(σ) - средняя вероятность ошибки I-ого рода; βср(σ) - средняя вероятность ошибки II-ого рода.
Определяем ошибки первого и второго рода с использованием ненормированных функций распределения показателя, которые разделены на три группы [4]:
ψ1(x) - для первой части объектов контроля (ОК), у которых показатель качества признан ниже области допустимых значений;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.