 –
екстремальне значення параметра поля контрольних допусків, де L– крок зміни поля допусків, при якому КФЕ
навчання досягає глобального значення
–
екстремальне значення параметра поля контрольних допусків, де L– крок зміни поля допусків, при якому КФЕ
навчання досягає глобального значення ![]() ;
;
Розглянемо
послідовність ![]() , де L
–крок зміни параметра
, де L
–крок зміни параметра ![]() , на якому КФЕ навчання
досягає значення
, на якому КФЕ навчання
досягає значення ![]() і
і ![]()
 –
– . Тут
. Тут ![]() –
будь-яке мале додатнє число.
–
будь-яке мале додатнє число.
Тоді має місце таке твердження:
Т в е р д ж е н н
я 4.4.2. Послідовність
![]() при збільшенні параметра
при збільшенні параметра ![]() до
величини
до
величини ![]() монотонно спадає і обмежена знизу.
монотонно спадає і обмежена знизу.
Як витікає із
твердження 2.3.4 інформаційний КФЕ, який є функціоналом від точнісних
характеристик, має в робочій області його визначення глобальний максимум (за
допущенням при ![]() ), тому при
), тому при ![]() твердження 4.4.2 має місце.
твердження 4.4.2 має місце.
Т е о р е м а
4.4.2. Алгоритм паралельної оптимізації контрольних допусків на ознаки
розпізнавання збігається за ймовірністю, тобто  , де
, де ![]() – будь-яке мале додатнє число.
– будь-яке мале додатнє число.
Для доведення
цієї теореми достатньо показати, що послідовність ![]() не є стаціонарною, тобто
не є стаціонарною, тобто ![]() , оскільки екстремальний
параметр , по крайній мірі, для однієї
ознаки розпізнавання не є оптимальним.
, оскільки екстремальний
параметр , по крайній мірі, для однієї
ознаки розпізнавання не є оптимальним.
Розглянемо схему
алгоритму LEARNING-1, призначеного для послідовної
оптимізації контрольних допусків на ознаки розпізнавання за процедурою (4.4.1).
Вхідні дані: масив реалізацій образу ![]() ; стартова СКД
; стартова СКД ![]() і система нормованих допусків (СНД)
і система нормованих допусків (СНД) ![]() , яка
визначає область значень відповідних контрольних допусків. Стартовий параметр
, яка
визначає область значень відповідних контрольних допусків. Стартовий параметр ![]() поля контрольних допусків може
дорівнювати половині відповідного симетричного поля нормованих допусків для і-ї
ознаки за умови випадковості її значень. Попередньо для кожної ознаки визначається ціна градації
поля контрольних допусків може
дорівнювати половині відповідного симетричного поля нормованих допусків для і-ї
ознаки за умови випадковості її значень. Попередньо для кожної ознаки визначається ціна градації ![]() , на яку змінюється і-та ознака.
, на яку змінюється і-та ознака.
Схема алгоритму послідовної оптимізації контрольних допусків така:
1. Обнуління лічильника прогонів процедури оптимізації параметрів навчання: l:=0.
2. Для стартової системи
допусків обчислюється за базовим алгоритмом навчання LEARNING значення функції  .
.
3. Формування лічильника прогонів: l: l+1.
4. Обнуління лічильника ознак розпізнавання: і:=0.
5. Формування лічильника ознак розпізнавання: і: і+1.
6. Визначення екстремального
значення параметра  за процедурою (4.4.1), в якій
внутрішній цикл оптимізації реалізує базовий алгоритм LEARNING.
за процедурою (4.4.1), в якій
внутрішній цикл оптимізації реалізує базовий алгоритм LEARNING.
7. 
 .
.
8. Якщо ![]() ,
то виконується пункт 5, інакше пункт 9.
,
то виконується пункт 5, інакше пункт 9.
9. Якщо  ,
де
,
де ![]() – будь-яке мале позитивне число, то
виконується пункт 10, інакше пункт 3.
– будь-яке мале позитивне число, то
виконується пункт 10, інакше пункт 3.
10.  і “Зупин”.
і “Зупин”.
Приклад реалізації алгоритму послідовної оптимізації ознак розпізнавання наведено в сьомому розділі.
Паралельний
алгоритм LEARNING-2 оптимізує параметри контейнерів
класів розпізнавання за умови ітераційної процедури визначення для базового
класу ![]() оптимальних контрольних допусків на всі
ознаки одночасно. Вхідні дані такі самі як і для алгоритму LEARNING-1, але за область визначення
параметра
оптимальних контрольних допусків на всі
ознаки одночасно. Вхідні дані такі самі як і для алгоритму LEARNING-1, але за область визначення
параметра ![]() приймається інтервал
приймається інтервал ![]() , де
, де ![]() - ширина нормованого поля
допусків. Розглянемо кроки реалізації цього алгоритму:
- ширина нормованого поля
допусків. Розглянемо кроки реалізації цього алгоритму:
1.
Обнулюється
лічильник кроків зміни параметра ![]() : l:=0.
: l:=0.
2.
Запускається
лічильник: l:=l+1 і обчислюються нижні та верхні контрольні
допуски для всіх ознак: ![]() і
і ![]()
![]() , відповідно.
, відповідно.
3. Реалізується базовий алгоритм навчання.
4.
Якщо ![]() , то виконується пункт 5, інакше пункт 6.
, то виконується пункт 5, інакше пункт 6.
5.
Якщо ![]() , то виконується пункт 2, інакше пункт 6.
, то виконується пункт 2, інакше пункт 6.
6.

![]() і “ЗУПИН”.
і “ЗУПИН”.
Розглянемо
приклад паралельної оптимізації СКД в процесі автофокусування растрового електронного мікроскопа
РЕМ-103 за наведеними на рис. 4.2 зображеннями зразка, що
досліджувався. На кожному кроці настроювання для поточного значення ![]() , яке збільшувалося на
одиницю, обчислювався критерій оптимізації за формулою (3.5.5) і визначалось
оптимальне значення радіуса контейнера базового класу
, яке збільшувалося на
одиницю, обчислювався критерій оптимізації за формулою (3.5.5) і визначалось
оптимальне значення радіуса контейнера базового класу ![]() .
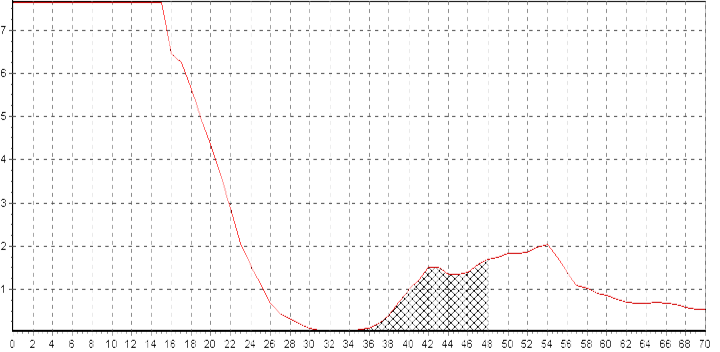
На рис. 4.5 наведено залежність модифікації критерію Кульбака від параметра
.
На рис. 4.5 наведено залежність модифікації критерію Кульбака від параметра ![]() в процесі навчання за
алгоритмом LEARNING-2.
в процесі навчання за
алгоритмом LEARNING-2.
 J1
J1
d
Рис. 4.5. Залежність КФЕ від параметра поля допусків
На рис. 4.6 показано
залежність КФЕ від радіуса контейнера класу ![]() для
оптимального значення
для
оптимального значення ![]() , яке є максимальним в робочій області
на рис. 4.5.
, яке є максимальним в робочій області
на рис. 4.5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.