Утабл.4.1 значення К1 дорівнює
|
|
|
Аналіз точнісних характеристик за даними табл. 4.1 показує, що робочою
областю визначення функцій розглянутих вище критеріїв оптимізації є область між
значеннями dm=3 і dm=7, де помилки a і b менше відповідних достовірностей.
При цьому оптимальний радіус контейнера для класу ![]() за
критерієм
за
критерієм ![]() дорівнює
дорівнює ![]() =k- 1 = 5. Оптимальний контейнер
за критерієм Jm має так само радіус
=k- 1 = 5. Оптимальний контейнер
за критерієм Jm має так само радіус ![]() =5, а за критерієм
=5, а за критерієм ![]() -
- ![]() =4. Таким чином, запропоновані
модифікації критеріїв Шеннона і Кульбака дають у робочій області їх визначення
однакові або близькі екстремальні значення їх аргументів. Зображена на рис. 4.2
область 12, яка побудована за критерієм максимуму правдоподібності за наведеною
в праці [66] методикою, забезпечує максимальне відношенні “своїх” реалізацій до
“чужих”. Порівняльний аналіз властивостей розглянутих модифікацій КФЕ за табл.
4.1 дозволяє зробити висновок про інваріантність КФЕ за Шенноном до критерію
максимуму правдоподібності в той час як критерій Кульбака (загальний і
частковий) є з ним корельованим, що пов’язано з його конструкцією. Оскільки
значення запропонованих модифікацій Кульбака так само корельовані в процесі
навчання за МФСВ із значеннями модифікації критерію за Шенноном (3.2.2), то
можна зробити висновок, що критерій Кульбака є узагальненням ентропійного
критерію Шеннона (3.1.1) і критерію Фішера [126], який за своєю суттю є
критерієм правдоподібності.
=4. Таким чином, запропоновані
модифікації критеріїв Шеннона і Кульбака дають у робочій області їх визначення
однакові або близькі екстремальні значення їх аргументів. Зображена на рис. 4.2
область 12, яка побудована за критерієм максимуму правдоподібності за наведеною
в праці [66] методикою, забезпечує максимальне відношенні “своїх” реалізацій до
“чужих”. Порівняльний аналіз властивостей розглянутих модифікацій КФЕ за табл.
4.1 дозволяє зробити висновок про інваріантність КФЕ за Шенноном до критерію
максимуму правдоподібності в той час як критерій Кульбака (загальний і
частковий) є з ним корельованим, що пов’язано з його конструкцією. Оскільки
значення запропонованих модифікацій Кульбака так само корельовані в процесі
навчання за МФСВ із значеннями модифікації критерію за Шенноном (3.2.2), то
можна зробити висновок, що критерій Кульбака є узагальненням ентропійного
критерію Шеннона (3.1.1) і критерію Фішера [126], який за своєю суттю є
критерієм правдоподібності.
Реалізацію базового алгоритмунавчання СК розглянемо на прикладі задачі
оптимізації геометричних параметрів контейнера, яка має місце при
автофокусуванні растрового електронного мікроскопа РЕМ-103 виробництва ВАТ “Selmi” (м.Суми, Україна) за зображенням
зразка, що досліджується. Ідея автофокусування у рамках класифікаційного
настроювання за МФСВ полягає у побудові на кожному кроці автофокусування
оптимального контейнера ![]() для початкового
розфокусованого зображення (клас
для початкового
розфокусованого зображення (клас ![]() ) відносно поточного зображення
(клас
) відносно поточного зображення
(клас ![]() ), одержаного на S-му кроці, і пошуку в процесі
настроювання максимуму інформаційної міри різноманітності цих класів з метою
визначення екстремального кроку S*. Як параметр настроювання розглядався струм управляючої
обмотки об’єктивної лінзи, який програмно змінювався на кожному кроці за
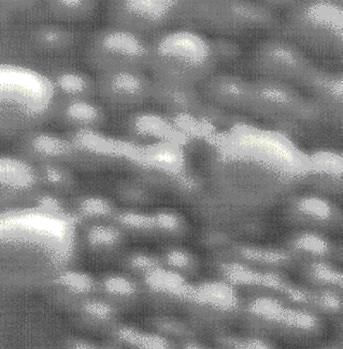
алгоритмом (2.7.2). На
рис. 4.2а показано початкове розфокусоване зображення об’єкту «Кулі» (клас
), одержаного на S-му кроці, і пошуку в процесі
настроювання максимуму інформаційної міри різноманітності цих класів з метою
визначення екстремального кроку S*. Як параметр настроювання розглядався струм управляючої
обмотки об’єктивної лінзи, який програмно змінювався на кожному кроці за
алгоритмом (2.7.2). На
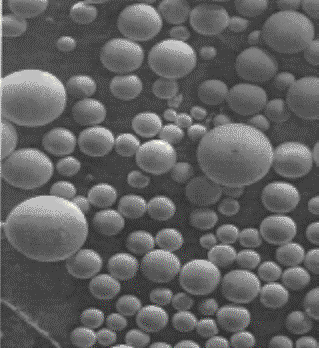
рис. 4.2а показано початкове розфокусоване зображення об’єкту «Кулі» (клас
![]() ), а на
рис. 4.2б - зображення цього об’єкту, яке отримано на S-му кроці настроювання мікроскопа (клас
), а на
рис. 4.2б - зображення цього об’єкту, яке отримано на S-му кроці настроювання мікроскопа (клас ![]() ).
).
|
|
|
а) б)
Рис. 4.2. Зображення об’єкту «Кулі»: а) початкове розфокусоване
зображення; б) поточне зображення
Формування
навчальної матриці ||![]() || здійснювалося шляхом сканування зображення
|| здійснювалося шляхом сканування зображення ![]() і виміру його яскравості в
рецепторному полі розміром 51
і виміру його яскравості в
рецепторному полі розміром 51![]() 300 пікселів. При цьому за реалізацію зображення
300 пікселів. При цьому за реалізацію зображення ![]() приймалась
крива розподілу яскравості в j-му рядку рецепторного поля. Після визначення усередненої
еталонної реалізації y1 було задано СКД, в якій поле
допусків складало d=
приймалась
крива розподілу яскравості в j-му рядку рецепторного поля. Після визначення усередненої
еталонної реалізації y1 було задано СКД, в якій поле
допусків складало d=![]() 40 градацій яскравості для всіх
дискрет реалізації. Бінарна навчальна матриця ||
40 градацій яскравості для всіх
дискрет реалізації. Бінарна навчальна матриця || || формувалася за правилом (4.1.1), а еталонний вектор x1 - за правилом (4.1.2) при рівні селекції r1=0,5.
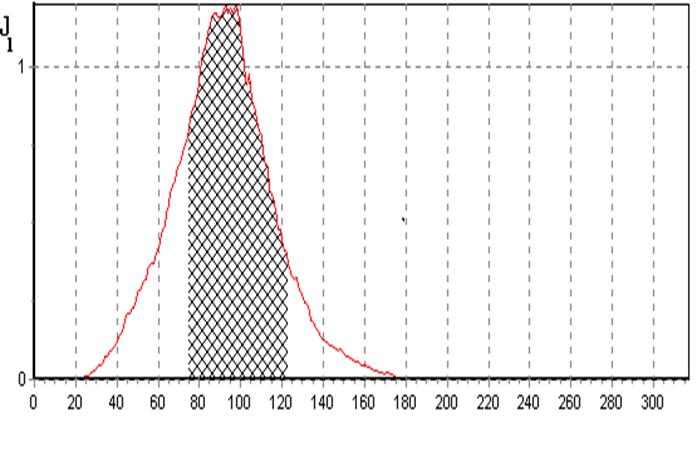
Аналогічно оброблялось зображення
|| формувалася за правилом (4.1.1), а еталонний вектор x1 - за правилом (4.1.2) при рівні селекції r1=0,5.
Аналогічно оброблялось зображення ![]() . На рис.4.3 показано залежність КФЕ за Кульбаком,
який обчислювався за модифікацією (3.5.5), від радіуса d1. Тут штриховкою
виділено робочу область визначення критерію
. На рис.4.3 показано залежність КФЕ за Кульбаком,
який обчислювався за модифікацією (3.5.5), від радіуса d1. Тут штриховкою
виділено робочу область визначення критерію ![]() , в якій
здійснюється пошук оптимального значення радіуса контейнера класу
, в якій
здійснюється пошук оптимального значення радіуса контейнера класу ![]() .
.
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.