Вполне очевидно, что возможны и другие комбинации сигналов на указанных выходах устройства, приведенного на рис. 7.57, в зависимости от режима работы его цифрового формирователя и настройки полосовых фильтров. Однако изложенное выше уже достаточно полно иллюстрирует принципиальные возможности создания на серийной элементной базе унифицированных формирователей ансамблей различных видов простых и сложных сигналов с изменяемыми параметрами в зависимости от режима работы цифрового формирователя модулирующих радиоимпульсов.
8 ПРИНЦИПЫ ПОСТРОЕНИЯ ОДНОКАНАЛЬНЫХ И МНОГОКАНАЛЬНЫХ ПЕРЕДАЮЩИХ СИСТЕМ
8.1. Однокаскадное построение передающих устройств и их применение
Построение радиолокационного передатчика определяется его назначением и условиями эксплуатации. Основные характеристики РПУ (мощность, частота, форма зондирующего сигнала, стабильность его параметров, диапазон перестройки и режим работы), а свою очередь, определяются общими тактико-техническими требованиями, предъявляемыми к РЛС, такими, как требуемая дальность обнаружения, разрешающая способность по дальности, скорости и угловым координатам, точность определения координат и др.
Высокочастотный тракт современных радиопередающих устройств строится по однокаскадной, многокаскадном и многоканальной схемам.
|
|
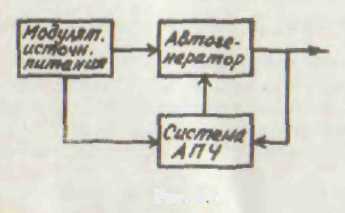
Типовая схема однокаскадного РПУ импульсной РЛС приведена на рис. 8.1.. Особенностью построения РПУ является использование в качестве источника СВЧ колебаний мощного автогенератора. Обычно таким автогенератором является триод-ный генератор, магнетронный генератор или ЛОВ «М». Он определяет как стабильность частоты, так и уровень генерируемой мощности.
Рис 8.1.
Требования к РПУ в ряде случаев не могут быть удовлетворены при однокаскадном построении импульсных передающих устройств. Так, при использовании электромеханических систем автоподстройки частоты в импульсном магнетронном или триодном передатчике может быть получена долговременная стабильность частоты до 10-4
кратковременная стабильность до 10-5.Это не может в ряде случаев удовлетворить требования к зондирующему сигналу, напримеp , в доплеровском РЛС.
Кроме того, в однокаскадном РПУ ограничены (возможности (осуществления внутриимпульсной модуляции генератора по частоте и фазе. Так, в магнетроне для управления частотой колебании в течение импульса можно использовать эффект электронного смещения частоты при изменении анодного тока. Однако изменение анодного тока сопровождается значительными изменениями мощности и нарушением стабильности работы магнетрона. В некоторых случаях для управления частотой магнетрона можно использовать эффект затягивания частоты при работе магнетрона на рассогласованную нагрузку. Частотная модуляция осуществляется путем изменения фазы коэффициента отражения в течение импульса быстродействующим ферритовым фазовращателем. Однако в этом случае достижение высокой точности воспроизведения заданного закона внутриимпульсной модуляции затруднительно.
Использование мощных импульсных автогенераторов СВЧ на лампах обратной волны М-типа, обладающих большой крутизной электронной перестройки частоты, также малоэффективно но следующим причинам. Во-первых, трудно добиться (воспроизведения формы высоковольтного модулирующего импульса, а следовательно, и точности воспроизведения закона внутриимпульсной модуляции. Во-вторых, сложно стабилизировать несущую (среднюю) частоту сигнала и поддерживать когерентность колебаний гетеродина. Распространенность однокаскадных передатчиков в радиолокационных станциях объясняется, во-первых, существовавшими до недавнего времени трудностями усиления колебаний СВЧ диапазона и, во-вторых, рядом достоинств, которыми обладают однокаскадные передатчики. К ним относятся простота схемного и конструктивного выполнения, малый вес и габариты, небольшая стоимость, простота и малые эксплуатационные расходы. Широкое использование в радиолокационных станциях линейно-частотно-модулированных и фазоманипулированных сигналов, а также доплеровского метода радиолокации потребовало существенного обновления принципов построения РПУ.
8.2. Принципы построения многокаскадных передающих устройств
8.2.1. Структурные схемы многокаскадных передающих устройств
Радиопередающие устройства современных РЛС строятся, как правило, по многокаскадной схеме, состоящей из возбудителя (или задающего генератора) и каскадов усиления. Многокаскадные РПУ по сравнению с однокаскадными обладают возможностями управления частотой или фазой колебаний, позволяют получать более высокую стабильность несущей частоты или частотных параметров сигналов сложной структуры, а также весьма значительную мощность выходных колебаний.
В многокаскадных передающих устройствах в отличие от одно каскадных оказывается возможным разделение функций стабилизации частоты, внутриимпульсной модуляции и усиления мощности между каскадами . Построение многокаскадных РПУ оказалось возможным благодаря разработке мощных усилительных приборов: пролетных, клистронов, ЛБВ, амплитронов и др. Многокаскадные РПУ используются при формировании как непрерывных, так и импульсных зондирующих сигналов. В общем виде схема многокаскадного РПУ импульсной РЛС представлена на рис. 8.2.
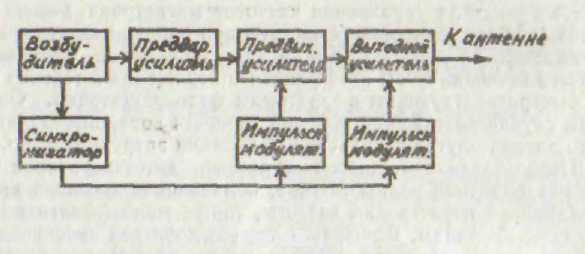
Рис 8.2
Многокаскадный передатчик включает возбудитель, предварительные каскады усиления, предвыходной усилитель мощности и выходной усилитель. На возбудитель возлагается задача формирования сигналов заданной структуры и обеспечения высокой стабильности параметров, определяющих эту структуру. Мощность колебаний возбудителя должна быть достаточной для возбуждения предварительного усилителя. Колебания возбудителя могут быть стабилизированы кварцем, частота которого многократно умножается, например, в транзисторно-варакторной цепочке. Умножители такого типа имеют малые габариты и вес, весьма экономичны и обеспечивают высокую стабильность частоты выходного колебания. При необходимости в возбудителе осуществляется частотная либо фазовая модуляция или манипуляция. Возбудитель в зависимости от предъявленных к нему требований может быть однокаскадным или многокаскадным. Поскольку формирование сигналов осуществляется на пониженной мощности, необходимый ее уровень обеспечивается усилительной цепочкой, состоящей из усилителей напряжения и мощности. При разработке возбудителя на пониженной частоте в состав предварительного усилителя РПУ включают либо умножитель частоты, либо смеситель.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.