Возможности применения
активного аналогового метода фазовой модуляции для формирования ЛЧМ сигналов
ограничиваются реализуемыми пределами изменения фазы. Наибольшие изменения фазы
возможны при электронном способе управления в усилителях СВЧ с
электродинамическим управлением электронным потоком, которые составляют около
300° в пролетных клистронах, до 800°в типовых ЛБВ и порядка 104...105
градусов в специальных ЛБВ с трубкой дрейфа. Поэтому даже в ЛБВ с трубкой
дрейфа достигаемая величина ![]() , что не
позволяет формировать ЛЧМ сигналы с большими девиациями частоты Dfc при больших
длительностях tc (рис.
7.20, штрихпунктирный график — 2).
, что не
позволяет формировать ЛЧМ сигналы с большими девиациями частоты Dfc при больших
длительностях tc (рис.
7.20, штрихпунктирный график — 2).
7.5. Принципы построения устройств при пассивной, активных аналоговом и цифровом методах формирования КФМ сигналов
В радиолокации находят
применение КФМ сигналы а виде n коротких
сомкнутых между собой импульсов (дискретов), имеющих постоянную амплитуду Um, длительность tд, частоту w0 и двузначную переменную
начальную фазу![]() , которая изменяется в
моменты
, которая изменяется в
моменты ![]() . Последовательность чередующихся
фаз j1 и j2 определяется выбранным кодом. Условно КФМ сигнал
записывается в виде
. Последовательность чередующихся
фаз j1 и j2 определяется выбранным кодом. Условно КФМ сигнал
записывается в виде
![]() при 0£ ti £tc (7.23)
при 0£ ti £tc (7.23)
Формирование КФМ сигналов можно осуществить как на несущей частоте зондирующего сигнала, так и на пониженной промежуточной частоте с последующим ее преобразованием с помощью смесителей. Иногда для повышения частоты применяют умножение частоты. При этом кратность умножения в случае двузначной манипуляции фазы вида j1 = 0 и j2 = p выбирается обязательно нечетной, иначе произойдет декодирование фазовой манипуляции. Формирование КФМ сигналов на более высокой частоте, чем требуемая несущая частота зондирующего сигнала, производится тогда, когда в требуемом диапазоне частот не удается обеспечить необходимого быстродействия манипуляции фазы.
Фазовую манипуляцию можно осуществить как при импульсном, так и непрерывном генерировании одними и теми же методами.
Структурная схема устройства при пассивном методе формирования КФМ сигналов приведена на рис. 7.39.
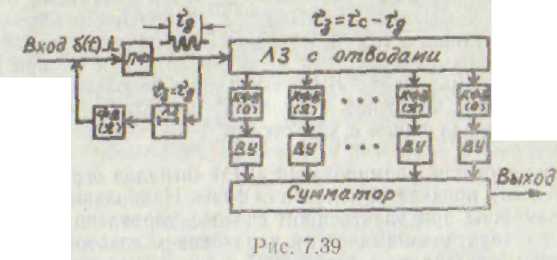
Полосовой фильтр (ПФ)
настроен на частоту w0 и имеет ширину
полосы пропускания  . Постоянная линия задержки
(ЛЗ) с запаздыванием tз =tд и фазовращатель (ФВ) со сдвигом фазы Dj=p образуют цепь
отрицательной обратной связи. Полосовой фильтр возбуждается короткими d(t) - импульсами
длительностью td£tд . На выходе полосового фильтра длительность радиоимпульса
частоты w0 точно равна tд, поскольку
полосовой фильтр охвачен отрицательной обратной связью с запаздыванием tз=tд. Этот радиоимпульс поступает
на линию задержки с временем запаздывания
. Постоянная линия задержки
(ЛЗ) с запаздыванием tз =tд и фазовращатель (ФВ) со сдвигом фазы Dj=p образуют цепь
отрицательной обратной связи. Полосовой фильтр возбуждается короткими d(t) - импульсами
длительностью td£tд . На выходе полосового фильтра длительность радиоимпульса
частоты w0 точно равна tд, поскольку
полосовой фильтр охвачен отрицательной обратной связью с запаздыванием tз=tд. Этот радиоимпульс поступает
на линию задержки с временем запаздывания ![]() и
n отводами, с которых
задержанные на время tд импульсы поступают на кодовые фазовращатели (КФВ). С
помощью кодовых фазовращателей набирается необходимый код фазовой манипуляции.
Весовые усилители (ВУ) компенсируют разницу затухания дискретов формируемого
сигнала вдоль линии задержки.
и
n отводами, с которых
задержанные на время tд импульсы поступают на кодовые фазовращатели (КФВ). С
помощью кодовых фазовращателей набирается необходимый код фазовой манипуляции.
Весовые усилители (ВУ) компенсируют разницу затухания дискретов формируемого
сигнала вдоль линии задержки.
Достоинства данного метода: простота технической реализации на сравнительно низких частотах; возможность обеспечения высокой кратковременной и долговременной стабильности параметров КФМ сигналов (при использовании термостатирования).
Его недостатки: сравнительно малый уровень мощности выходного сигнала (из-за большого затухания в линии задержки); сравнительно низкая частота, на которой возможна техническая реализация; наличие противоречий между увеличением длительности tc и числа дискретов n КФМ сигнала и уменьшением времени коммутации фазы (полоса пропускания линии задержки уменьшается с ростом tз).
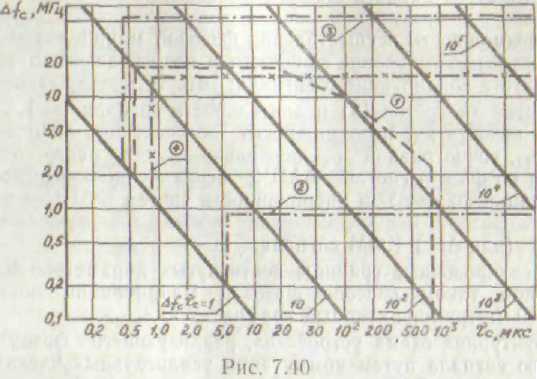
Ориентировочные границы
достигнутых значений ![]() и tc при пассивном
методе формирования КФМ сигналов приведены на рис. 7.40 (штриховая линия — 1).
и tc при пассивном
методе формирования КФМ сигналов приведены на рис. 7.40 (штриховая линия — 1).
Активные аналоговые методы формирования КФМ сигналов основаны на фазовой манипуляции гармонических колебаний автогенераторов и могут быть реализованы следующими способами:
1) путем фазовой манипуляции управляемых генераторов с электрической и электронной перестройкой частоты (фазы);
2) путем коммутации усилительных каскадов с разными сдвигами фазы сигнала, работающих на общую нагрузку;
3) путем фазовой манипуляции в трактах (линиях) передачи.
Фазовая манипуляция управляемых генераторов (УГ) основана на использовании систем ФАПЧ (рис. 7.41).
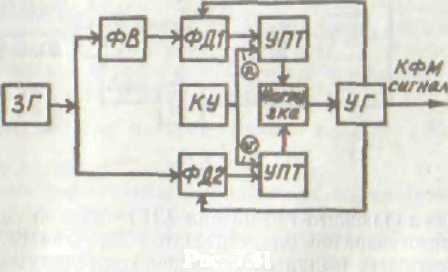
Рис. 7.41
Опорные колебания высокочастотного задающего генератора (ЗГ) подаются на фазовые детекторы ФД1 и ФД2 в противофазе благодаря наличию фазовращателя (ФВ). Усилители постоянного тока (УПТ) под воздействием видеоимпульсов, поступающих с солирующего
устройства (КУ),
открываются в соответствии с требуемым законом фазовой манипуляции ![]() . При этом начальная фаза колебаний управляемого генератора в каждом
дискрете (tд) устанавливается в
соответствии с тем, какой из УПТ открыт в данный момент времени.
. При этом начальная фаза колебаний управляемого генератора в каждом
дискрете (tд) устанавливается в
соответствии с тем, какой из УПТ открыт в данный момент времени.
Достоинства данного способа фазовой манипуляции: высокая стабильность (кратковременная и долговременная) несущей частоты; возможность осуществления фазовой манипуляции на сравнительно высоком уровне мощности и непосредственно на несущей частоте зондирующего сигнала; отсутствие ограничения по количеству дискретов (n) и длительности сигнала (tc ).
Его недостатки:
невозможность обеспечения величины ![]() , точно равной p,
поскольку имеет место остаточная ошибка по фазе в системе ФАПЧ; ограниченное
быстродействие коммутации фазы из-за инерционности систем ФАПЧ и управляемого
генератора, что ограничивает минимально возможную величину tд (или Dfc)
КФМ сигнала.
, точно равной p,
поскольку имеет место остаточная ошибка по фазе в системе ФАПЧ; ограниченное
быстродействие коммутации фазы из-за инерционности систем ФАПЧ и управляемого
генератора, что ограничивает минимально возможную величину tд (или Dfc)
КФМ сигнала.
Ориентировочные границы достигнутых параметров КФМ сигналов при таком способе фазовой манипуляции показаны на рис, 7.40 (штрих-пунктирный график — 2).
Структурная схема устройства, реализующего фазовую манипуляцию сигнала путем коммутации усилительных каскадов, изображена на рис.7.42.
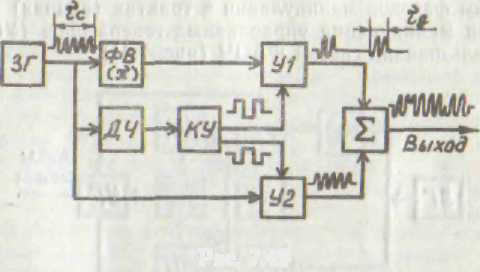
Рис. 7.42
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.