Следует заметить, что в соответствии с приведенными выше данными для входных кромок угол установки лопаток должен быть меньше 90°.
|
|
|
|
а) б)
|
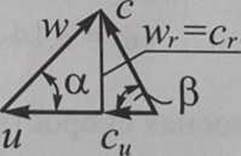
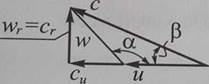
Рис. 4.5. Треугольники скоростей: а- при а > 90°; б - при а < 90° |
Для количественной оценки кинематических показателей рабочего колеса необходимо знать численное значение каждого вектора.
19. Вывод уравнения Эйлера для колеса радиального нагнетателя
Полное давление развиваемое нагнетателем:
![]() — основное
уравнение радиальных нагнетателей. Уравнение Эйлера — 1754г.
— основное
уравнение радиальных нагнетателей. Уравнение Эйлера — 1754г.
Используем
взаимосвязь между компонентами треугольника скоростей. Запишем теорему
косинусов для сечения межлопаточного канала:![]()
Где
![]() -угол между
скоростями С и U.
-угол между
скоростями С и U.
![]() (1)
(1)
![]() (2)
(2)
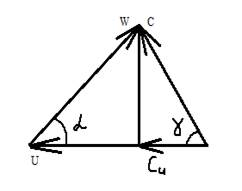
С – абсолютная скорость
U – переносная скорость
Треугольник скоростей для радиального вентилятора.
Подставим (1) и (2) в основное уравнение радиальных нагнетателей.
![]()
![]()
![]()
![]() — уравнение
Эйлера (при
— уравнение
Эйлера (при ![]() перпендик. U1- проекция
абсолютной скорости на направление переносной
перпендик. U1- проекция
абсолютной скорости на направление переносной ![]() ).
).
Уравнение показывает, что полное теоретическое давление, разеваемое рабочим колесом радиального нагнетателя, линейно завесит от плотности р перемещаемой среды, угловой скорости вращения рабочего колеса, величины и соотношения радиусов всасывающего и нагнетающего отверстий межлопаточного канала, а также от его профиля. Согласно уравнению Эйлера на Рт оказывает влияние производительность рабочего колеса и форма лопатки на входе в канал и на выходе из него.
20.Анализ уравнения Эйлера. Безударный вход.
Задача
анализа: найти условие при котором нагнетатель будет достигать максимального
давления(Pm→max).![]() — уравнение
Эйлера)
— уравнение
Эйлера)
Для этого нужно, чтобы C2uU2 было больше, а U1C1u — меньше.
U1C1u=0 ( хотелось бы чтобы была отрицательной). U1≠0, т.е. ω≠0 R1≠0, т.е. неработающий нагнетатель, т.е. C1u=0
 tg
tg ![]() (*)
(*)
Анализ
уравнения Эйлера позволит найти зависимость при которой будет соблюдаться
безударный вход: ![]() — уравнение
Эйлера.
— уравнение
Эйлера.
![]()
![]()
![]() –
коэфф закрутки
–
коэфф закрутки
![]() -
мера динамической энергии
-
мера динамической энергии
Для
реальной жидкости ![]()
![]() -
коэфф, учитывающий внутренние гидравлические потери
-
коэфф, учитывающий внутренние гидравлические потери
![]()
Показывает соотнош между полн давлением нагнетателя и мерой дин энергии потока жидкости
![]()
Маркировка вентиляторов
ВР140-40
140-![]()
21.Режим безударного входа и его обеспечение.
Если вход ж-ти в межлопаточный канал не сопровождается
силовым воздействием. По этой причине не формируется связанные с этим потери
энергии привода. В теории нагнетателей такой вход ж-ти в канал рабочего колеса
называется безударным входом. Он характерен для большинства современных
радиальный в-ров и насосов. При режиме безударного входа ![]() (истинная
скорость) перпендикулярен
(истинная
скорость) перпендикулярен ![]() (линейная
скорость рабочего колеса).Для реализации режима БВ необходимо, чтобы входная
кромка лопатки была загнута в сторону вращения рабочего колес, т.е.
(линейная
скорость рабочего колеса).Для реализации режима БВ необходимо, чтобы входная
кромка лопатки была загнута в сторону вращения рабочего колес, т.е. ![]() <90
<90![]() .
Отсюда справедливо утверждение: профиль лопатки на входе однозначно
определяет требуемое направление вращения рабочего колеса.
.
Отсюда справедливо утверждение: профиль лопатки на входе однозначно
определяет требуемое направление вращения рабочего колеса.
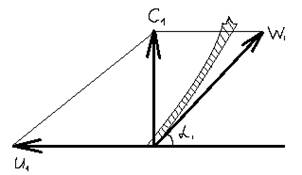
Результаты построения плана скоростей для случая ![]() =45
=45![]() и
L’<L*<L”
представлены на рис.L*
-производительность Н, при которой реализуется режим БВ.
и
L’<L*<L”
представлены на рис.L*
-производительность Н, при которой реализуется режим БВ.
С уменьшением производительности рабочего колеса от L*
до L’
векторы абсолютной и относительной скоростей приняли положение ![]() и
и
![]() .
При увеличении производительности от L*
до L’’
они приняли положение
.
При увеличении производительности от L*
до L’’
они приняли положение ![]() и
и
![]() .
.
Уменьшение и увеличение производительности
относительно указанного значения приводит к силовому взаимодействию потока
ж-ти с лопатками РК и к появлению потерь энергии на входе. Они будут тем
выше,чем больше степень отклонения рабочей производительности от значения L*
. При производительности L’<L*
поток ж-ти испытывает удар от фронтальной стороны лопатки и отклоняется в
сторону вращения колеса. L*<L”
ускоренный поток ж-ти ударяется о тыльную сторону лопатки и отклоняется в
направлении против вращения РК. На рис. Представлены векторы подвода ж-ти к
РК ![]() и
и
![]() ,
параллельны векторам
,
параллельны векторам ![]() и
и
![]() .Организация
подвода ж-ти по направлениям вектора
.Организация
подвода ж-ти по направлениям вектора ![]() и
и
![]() при
L
при
L![]() L*тоже,таким
образом, позволяет получить режим БВ. Для режима L<L*
подводимый к рабочему колесу поток ж-ти необходимо закрутить по направлению его
вращения. Для режима L>L*
- наоборот,против вращения РК.
L*тоже,таким
образом, позволяет получить режим БВ. Для режима L<L*
подводимый к рабочему колесу поток ж-ти необходимо закрутить по направлению его
вращения. Для режима L>L*
- наоборот,против вращения РК.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.