![]() °/с. Δ0 - σ0 – 0.3
град, σн – 3 А, Качество – 10
°/с. Δ0 - σ0 – 0.3
град, σн – 3 А, Качество – 10
Смещение 0 необходимо контролировать для снижения статических ошибок угловой стабилизации. Для уменьшения зоны нечувствительности на вход подают шумящий сигнал. В ДУСах также выделяют ошибки в районе нуля. Насыщение характеристик имеет значение, если исп. как чувствительный элемент бесплатформенной навигационной системы, и углы получаются интегрированием характеристик.
![]() - погрешность (уход)
угловых измерений, где a0- погрешность начальной выставки,
- погрешность (уход)
угловых измерений, где a0- погрешность начальной выставки,
![]() - время, прошедшее с
момента последней внешней коррекции.
- время, прошедшее с
момента последней внешней коррекции.
a1- основная характеристика
![]() линейная ошибка.
линейная ошибка.
Самое распространенное средство борьбы : паспортизация измерителей. (хар-ки скорости ухода запоминаются). Эти погрешности так быстро нарастают, что внешняя коррекция необходима, особенно при долгом полете.
-маятники (недост. – баллистическая девиация, нельзя исп-ть во время виража, т.к. двигается местная вертикаль);
-радиовысотомеры – обеспечивают измерение высоты с точностью до единиц метров и единиц % от текущей Н на малых высотах. Недостатки – отсутствие скрытности при включении, поэтому используются на конечном участке полета.
- АПСН (аппаратура спутниковой навигации, обеспечивает на порядок худшую точность, чем РВ, но обесп. скрытность. Используется на марше. Но самолеты РЭБ подавляют действие в радиусе 200 км от своего местоположения.);
- баровысотомер
- управление телекомандами.
БЦВС и требования к ней
СУД – система управления движением.
БЦВС – характеризуется задержкой выходного сигнала (зависит от типа экстраполятора)
ЭНП:
 - запаздывание
ЭНП=1/2 такта выдачи информации.
- запаздывание
ЭНП=1/2 такта выдачи информации.
К нему добавляется задержка БЦВС:
![]()
![]() - общее запаздывание
- общее запаздывание
![]() - звено чистого
запаздывания
- звено чистого
запаздывания
![]()
40 Гц – Δφ=24°
80 Гц - Δφ=12°
1.Возможность транспонирования частот при дискретизации по времени;
2. Релейный характер дискретизации по уровню, возможные автоколебания, необх-ть работы либо с уменьшенными контролируемыми масштабами, либо с увеличенными в длину словами для их добавления.
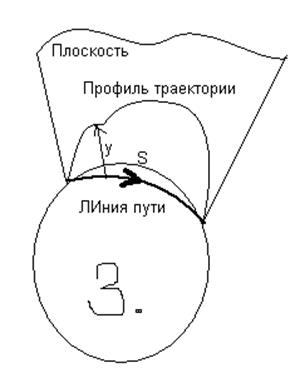
2.Понятие линии пути и профиля траектории
Линия пути – (трасса движения/полета) желаемая проекция траектории на поверхность Земли.
То что было написано в конспекте.
П=Ек+Еп = m(gy+V2\2) – полная энергия.
П\m = p = gy+V2\2 = f(y,V); - полная энергия, отнесенная к единице массы ЛА:
Полная энергия и скорость возрастает монотонно.
Билет №5
1. Структурная схема контура стабилизации бокового движения ЛА
При исследовании устойчивости стабилизации ЛА по крену и курсу может быть использована следующая система уравнений в вариациях:
|
|
|
|
|
|
|
|
(1.1) |
|
|
|
|
|
Коэффициенты
![]() , рассчитаны для характерных точек
траектории полета ЛА. Параметры типовых режимов полета ЛА и значения
аэродинамических коэффициентов для этих режимов приведены в табл.1
, рассчитаны для характерных точек
траектории полета ЛА. Параметры типовых режимов полета ЛА и значения
аэродинамических коэффициентов для этих режимов приведены в табл.1
Математическая модель рулевых приводов может быть представлена виде передаточной функции :
|
|
(1.2) |
где ![]() – транспортное запаздывание рулевого
привода;
– транспортное запаздывание рулевого
привода;
![]() – постоянная времени рулевого привода;
– постоянная времени рулевого привода;
Проекции угловых скоростей измеряются гиротахометром (ДУСом), динамика которого может быть описана следующей передаточной функцией:
|
|
(1.3) |
где ![]() ;
;
![]() ;
;
Управляющие сигналы, реализуемые автопилотом по курсу и по крену, имеют следующий вид:
|
|
(1.4) |
|
|
(1.5) |
где ![]() ,
,![]() – проекции
угловых скоростей измеренные гиротахометром;
– проекции
угловых скоростей измеренные гиротахометром;
![]() ,
, ![]() –
передаточные числа автопилота по углам курса и крена;
–
передаточные числа автопилота по углам курса и крена;
![]() ,
, ![]() –
передаточные числа автопилота по угловым скоростям;
–
передаточные числа автопилота по угловым скоростям;
Описанный контур боковой стабилизации может быть представлен виде Рис 1.
Рис.1 – структурная схема контура боковой стабилизации
2. Использование приведенных характеристик ВРД при моделировании динамики СУ полетом ЛА
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; ;
;