2. Особенности СУ полетом с БЦВС.
Бортовые вычислительные машины получают информацию от навигационных систем и выдают переработанную информацию в навигационные системы, системы управления, системы отображения информации, системы управления оружием и т. д. Они предназначены для решения следующих задач:
1) определения текущего положения ЛА по данным систем счисления пути, инерциальных, радиотехнических и астрономических систем;
2) выдачи данных о географических, ортодромических, полярных координатах и других координатах ЛА;
3) расчета оптимальной высоты, дальности и времени полета на основе текущих значений скорости ветра и массы ЛА;
4) выбора запасного маршрута, программирования промежуточных точек маршрута и запасных аэродромов (или мест приземления);
5) выдачи необходимых данных об угловых положениях ЛА, курсе, высоте, путевой скорости, направлении и скорости ветра и др.;
6) управления ЛА через автопилот при взлете и посадке;
7) управления режимами полета;
8) контроля и управления расходом топлива;
9) расчета данных для перехвата цели;
10) определения маршрутов ЛА и наведения на цели;
11) выработки команд управления ЛА и его оружием при захвате цели бортовым локатором;
12) управления стрелково-пушечным вооружением и пуском ракет;
13) выработки команд выхода из атаки;
14) вычисления курса выхода в точку бомбометания и координат точки бомбометания на основе данных о положении цели, скорости и высоты полета, баллистических и метеорологических данных;
15) расчета маневра после сбрасывания бомб;
16) контроля режимов полета, параметров авиадвигателей, оборудования и систем;
17) определения исправности системы и выдачи сигналов о неисправности;
18) решения контрольных задач в полете и при проверке на земле.
Бортовые вычислительные машины по принципу представления математических величин подразделяются на аналоговые и цифровые.
БЦВМ не обладают недостатками аналоговых, а их преимущества в отношении универсальности, точности вычислений и возможности выполнять на одной и той же машине различные математические операции обусловили их широкое распространение в качестве бортовых вычислителей. В БЦВМ любая задача сводится к последовательности выполнения элементарных арифметических и логических действий. Поскольку такая последовательность действий программируется вне машины, то переход от решения одной задачи к другой сводится к смене программы. В БЦВМ используется двоичная система счисления, технически реализуемая на элементах с двумя устойчивыми положениями.
Функциональная схема БЦВМ показана на рис.2. Основными элементами машины являются управлявшее арифметическое устройство (УАУ), оперативное запоминающее устройство (ОЗУ), долговременное запоминающее устройство (ДЗУ) и устройства ввода—вывода (УВВ).УВВ связывают БЦВМ с управляемым объектом. Они воспринимают информацию от навигационных систем, преобразуют ее в код и вводят в БЦВМ для вычислений, осуществляют прием результатов вычислений, преобразуют их в управляющие сигналы и выдают на исполнительные устройства (САУ и др.).
Точность вычислений на БЦВМ определяется разрядностью представления чисел. На бортовых машинах оперируют с 16— 24-разрядными числами. При усложнении решаемых задач разрядность повышают до 36. Числа представляются в виде кода, содержащего определенное количество разрядов, а запятая, отделяющая целую часть числа от дробной, может быть фиксированной или плавающей.
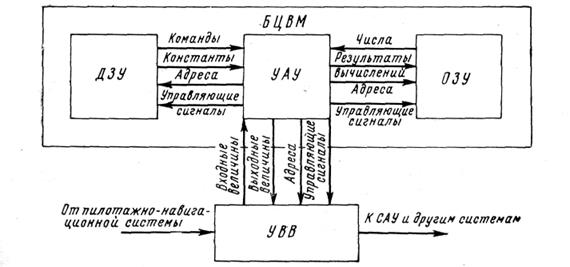
Рис. 2. Функциональная схема БЦВМ
Быстродействие БЦВМ зависит в основном от времени выполнения операций в арифметическом устройстве и от времени обращения к запоминающему устройству. Время выполнения операций в арифметическом устройстве определяется тактовой частотой, увеличение которой приводит к увеличению быстродействия. Но для этого следует применять элементы с малым временем переключения, т. е. быстродействующие элементы. Повышение быстродействия достигается также одновременным выполнением нескольких команд, параллельной обработкой информации несколькими устройствами и т. д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.