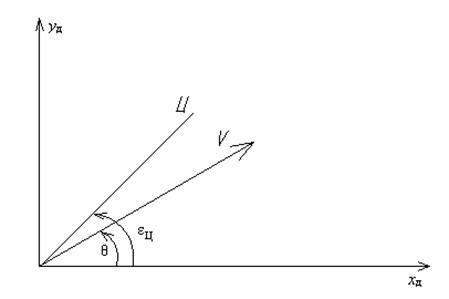
Рисунок 1 – Упрощенная схема метода погони
То есть, ![]() . Следует отметить, что наряду с методом
погони рассматривается метод погони с упреждением, при котором
. Следует отметить, что наряду с методом
погони рассматривается метод погони с упреждением, при котором
![]() .
.
Выведем кинематические соотношения метода погони.
Вначале введем орт
 . Отсюда
. Отсюда ![]() .
Подставим последнее соотношение в основное кинематическое тождество. Имеем
.
Подставим последнее соотношение в основное кинематическое тождество. Имеем
![]() ,
,
 ,
,
![]() ,
,
 ,
,
![]() .
.
![]() (c
оговоркой, если потребная перегрузка не превзойдет располагаемую).
(c
оговоркой, если потребная перегрузка не превзойдет располагаемую).
Выведем выражение для нормального ускорения
 .
.
Если в процессе
наведения не стремится к нулю разность ![]() ,
то есть если перехватчик в процессе наведения не заходит в хвост цели, то по
мере уменьшения относительной дальности Д потребные ускорения в какой-то момент
превышают располагаемое ускорение, и ракета «сходит» с кинематической
траектории. Появляется кинематический промах.
,
то есть если перехватчик в процессе наведения не заходит в хвост цели, то по
мере уменьшения относительной дальности Д потребные ускорения в какой-то момент
превышают располагаемое ускорение, и ракета «сходит» с кинематической
траектории. Появляется кинематический промах.
2.Структурная схема контура стабилизации продольного движения ЛА.
Исследовать контур продольной стабилизации ЛА в различных режимах полета при различных законах управления.
При исследовании устойчивости стабилизации ЛА по крену и курсу может быть использована следующая система уравнений в вариациях:
|
|
|
|
|
|
|
|
(2.1) |
|
|
|
|
|
Коэффициенты ![]() , рассчитаны для характерных точек
траектории полета ЛА. Параметры типовых режимов полета ЛА и значения
аэродинамических коэффициентов для этих режимов приведены в табл.2
, рассчитаны для характерных точек
траектории полета ЛА. Параметры типовых режимов полета ЛА и значения
аэродинамических коэффициентов для этих режимов приведены в табл.2
Математическая модель рулевых приводов может быть представлена виде передаточной функции :
|
|
(2.2) |
где ![]() – транспортное запаздывание рулевого
привода;
– транспортное запаздывание рулевого
привода;
![]() – постоянная времени рулевого привода;
– постоянная времени рулевого привода;
Проекции угловых скоростей измеряются гиротахометром (ДУСом), динамика которого может быть описана следующей передаточной функцией:
|
|
(2.3) |
где ![]() ;
;
![]() ;
;
Управляющие сигналы, реализуемые автопилотом по курсу и по крену имеют следующий вид:
|
|
(2.4) |
где ![]() – проекция угловой скорости тангажа
измеренная гиротахометром;
– проекция угловой скорости тангажа
измеренная гиротахометром;
![]() – угол тангажа;
– угол тангажа;
![]() – программная высота;
– программная высота;
![]() ,
, ![]() –
передаточные числа автопилота по углу тангажа;
–
передаточные числа автопилота по углу тангажа;
![]() – передаточное число автопилота высоты.
– передаточное число автопилота высоты.
Описанный контур боковой стабилизации может быть представлен виде Рис 2.
Рис. 2 – структурная схема контура продольной стабилизации
Билет 22.
1. Комплексирование измерителей в СУ ЛА.
Для достижения необходимой точности измерений летных параметров используются избыточные датчики.
Решаются три задачи:
1) Преодоление естественных недостатков, присущих тому или иному виду измерителей;
2) Повышение суммарной точности оценок параметров полета;
3) Повышение надежности СУ ЛА.
1) Например, гироскопический ДУС. Ставятся не три, а четыре датчика. Таким образом, по показаниям трех датчиков можно выяснить, какими должны быть показания четвертого.
2) Если мы имеем несколько измерителей одной и той же случайной величины, то мы можем построить линейную оценку, оценку с линейной дисперсией.
Баровысотомеры,
нейтронные и ионизационные датчики высоты. ![]() -
кванты излучения, на борту стоит ЧЭ и по частоте щелканий можно судить о
высоте.
-
кванты излучения, на борту стоит ЧЭ и по частоте щелканий можно судить о
высоте.
Баровысотомер:
«+»: - скрытность работы;
«-»: - точность не обеспечивает полет на сверхмалой высоте;
- зависимость от местного давления(барометрического);
- зависимость от скорости полета и углов атаки;
«+»: - отсутствие демаскирующих излучений;
- отсутствие возможности создания помех извне;
«-»: - относительно низкая надежность;
- точность работы не обеспечивает полет на сверх малых высотах;
- скорость ухода нарастает пропорционально времени, прошедшему со времени последней коррекции (как квадрат времени).
По габаритам сопоставимо с только что рассматриваемыми. Точность зависит от количества спутников. При наличии 3-4 спутников точнсть около 20-50 метров по высоте.
«+»: - только РВ МВ(малых высот) решает задачу обеспечения полета на сверхмалых высотах;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
; ;
;