Помехозащищенность - отсутствие ложных срабатываний от изменения климатических параметров, электромагнитных, звуковых, радиационных, световых и тепловых полей, динамических и вибрационных воздействий, как естественных, так и искусственных до определенного, заранее заданного или полученного уровня.
Отсюда следует очевидный вывод, что система должна удовлетворять заданным показателям качества при минимально возможной полосе пропускания и при этом на высоких частотах частотная характеристика не должна иметь резонансных всплесков.
Критерием помехозащищенности в указанных условиях будет значение дисперсии (или СКО) на выходе нелинейного элемента при выполнении требований на показатели качества.
СУС работают в условиях помех. Параметры помех заранее предсказать нельзя. Можно лишь предположить только их возможные диапазоны. Однако, данные телеметрии показывают, что в сигнале помех всегда можно выделить гармонику, амплитуда которой превышает амплитуды других гармоник. Это позволяет упростить задачу отыскания помехоустойчивости системы.
Будем считать, что на входе системы помимо полезного сигнала действует гармоническая помеха:
![]()
При этом частота помехи хотя бы на порядок выше максимальной частоты полезного сигнала. Помехи такого рода по месту их возникновения делятся на:
· Внешние (вызывающие вынужденные колебания в системе).
· Внутренние (возникающие в замкнутом контуре системы как автоколебания и определяются свойствами самой системы).
Примеры внешних помех:
· Помехи, возникающие из-за автоколебательного режима измерительных устройств;
· Автоколебания, возникающие в общих цепях питания различных элементов и блоков СУ;
· Ступенчатость характеристик потенциометрических датчиков или задания программ.
Внешние помехи в основном представляют собой гармонические составляющие сигналов управления, возникающие в результате автоколебаний на частотах упругих колебаний и колебаний жидкости. Эти помехи приводят к возникновению нелинейности, т.е. в условиях помех меняются коэффициенты передач нелинейных звеньев по полезному сигналу.
С помехами можно бороться двояко:
Ликвидировать источники помех.
Для внутренних помех - выбор параметров системы таким образом, чтобы в ней не появились автоколебания с недопустимыми параметрами, при которых система по полезному сигналу стала бы неустойчива. Т.к. Вп и Wп заранее неизвестны, то в общем случае в результате исследования помехоустойчивости необходимо определить область значений параметров помехи, при которых система устойчива по полезному сигналу.
Если Вп и Wп лежат в заштрихованной области, то они не сильно размывают существующие нелинейности и это не приводит к изменению по полезному сигналу.
Кривая, ограничивающая область параметров помехи, при которых система устойчива называется кривой помехоустойчивости: Вп=f(Wп).
Если параметры лежат на кривой помехоустойчивости, то система находится на границе устойчивости.
Заметим, что для линейных систем рассмотренное понятие помехоустойчивости не имеет смысла. В них действует принцип суперпозиций и наличие помех не вызывает потери устойчивости.
Для нелинейных систем не действует принцип суперпозиций.
|
|
Рассмотрим физическую картину прохождения сложного сигнала через нелинейное звено. Нелинейных звеньев в СУС много, поэтому придется рассматривать только основную нелинейную характеристику СУС.
В качестве такой основной характеристики в СУС выступает скоростная характеристика рулевой машинки.
Статическая характеристика имеет вид:
![]()
Билет №4
1. Требования к характеристикам технических средств и программам СУ полетом, их математические модели.
В простейшую схему (видимо, СУ) не вошла нелинейная динамика.

В общем случае зависимость тока управления от скорости перекладки руля:
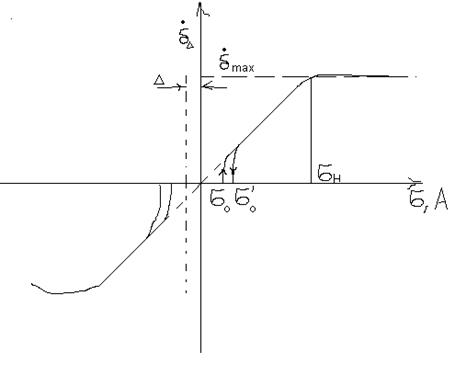
Δ – смещение нуля скоростной характеристики.
Завал
скоростной характеристики не учитывается. Появляется порог насыщения ![]() . Отношение порогов –
качество привода.
. Отношение порогов –
качество привода.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.