Барометрические измерители высоты. Баровысотомер основан на использовании функциональной зависимости давления и температуры воздушного столба от высоты полета ЛА. Простой и надежный в конструктивном и схемном плане прибор обладает, однако, существенными составляющими методической и инструментальной погрешностей. Барометрический метод позволяет измерять лишь высоту относительно уровня моря или другого места с заданным уровнем давления. Он не позволяет определять текущую (истинную) высоту относительно подстилающей поверхности, так как изобары (линии равных давлений) не эквипотенциальны земной поверхности. Это следует учитывать при комплексирования барометрических измерителей с измерителями высоты, основанными на других физических принципах.
Радиотехнический измеритель высоты. Радиовысотомер измеряет истинную высоту полета над пролетаемой местностью. Характер отраженного сигнала находится в сильной зависимости от свойств подстилающей поверхности, что приводит к необходимости введения фильтров в выходные блоки радиовысотомера. Эти фильтры в основном определяют динамику измерителя по полезному сигналу:
 ;
;
где
![]() —размерный коэффициент;
—размерный коэффициент;
![]() — постоянная времени;
— постоянная времени; ![]() .
.
Шумовая
(флюктуационная) составляющая погрешности обычно описывается стационарным
случайным процессом типа белого шума с корреляционной функцией ![]() . Значение среднеквадратической
погрешности
. Значение среднеквадратической
погрешности ![]() зависит от высоты и характера подстилающей
поверхности.
зависит от высоты и характера подстилающей
поверхности.
Для
радиовысотомера малых высот (диапазон 0—1500м) ориентировочные значения составляют: ![]() на высотах 0—10 м и
на высотах 0—10 м и ![]() на высотах более 10 м.
на высотах более 10 м.
Баровысотомер реагирует на изменение местного давления, угол атаки, изменение скорости полета.
Эти недостатки помогает в значительной степени преодолеть комплексирование измерителей высоты. Вариантов решения этой задачи много. Рассмотрим несколько примеров.
Комплексирование радиовысотомера (РВ) и баровысотомера (БВ) с использованием сигнала «Надежность РВ» (Рис. 7).
|
|
|
|
Рис. 7 – структурная схема комплексирования высоты полета ЛА |
|
|
|
|
|
|
|
«Надежность РВ»(ДД) – «данные достоверны»
При отсутствии «Надежности РВ» запоминается последняя поправка к показаниям БВ. Эта же схема обеспечивает введение «поправки дня».
2. Комплексирование РВ, БВ и гировертикали с использованием сигнала «Надежность РВ» (Рис.8).
|
|
|
Рис.8 – Схема комплексирования с использованием сигнала гировертикали |
Билет №8
1. Кворум-фильтры.
На лекции мы рассматривали на примере выбора среднего сигнала. То есть, поставив такой фильтр, при формировании нескольких сигналов можем всегда выбирать среднее – мажоритарный элемент. К достоинствам применения данного элемента относится надежность.
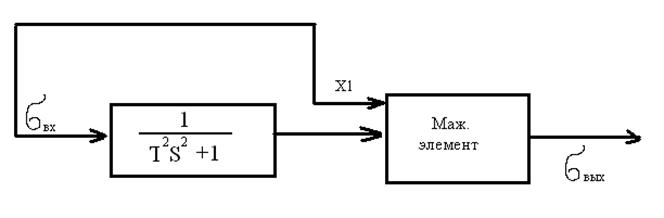
![]()
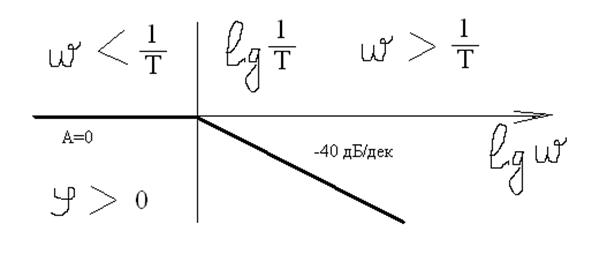
Нет фильтрации и нет потери фазы. Высокочастотные сигналы не пропускаются.
В случае кворум-фильтра наличие составляющей входного сигнала разрушает исходную модель фильтрации и требует либо такого же решения как ∆-звено с ∆-характеристикой либо для такого же сигнала используется сигнал ОС.
2. Координированный разворот.
Разворотом ЛА называется поворот его вектора скорости центра масс на заданный угол в горизонтальной плоскости. Разворот может быть осуществлен за счет одновременного координированного воздействия как на руль направления, так и на элероны, т.е. путем создания боковой силы не только за счет скольжения, но также за счет крена. При развороте с креном процесс заканчивается значительно быстрее, чем при плоском развороте. При осуществлении разворота стремятся получить минимальное время разворота при нулевом скольжении и при малом угле крена на градус разворота.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ;
;