В БЦВМ в качестве запоминающих устройств (ЗУ) применяются магнитные барабаны, диски и сердечники, трансфлюксоры, стеклянные линии задержки и тонкие пленки.
Важной характеристикой БЦВМ является ее надежность, которая обеспечивается автоматическим непрерывным контролем линий и сигнализацией отказавших частей, резервированием всей машины, резервированием отдельных наиболее важных узлов и автоматическим отключением отказавших узлов.
Для изучения принципов обработки информации в БЦВМ рассмотрим ее работу в комплексной навигационной системе, состоящей из инерциальной системы навигации, используемой как активная память, радионавигационной системы и доплеровского измерителя (рис. 3). Радиотехнические системы (РНС и ДИСС) используются для коррекции погрешностей инерциальной системы навигации, которая часто является основным средством получения навигационной информации. Достоверность информации, выдаваемой комплексной системой, обеспечивается непрерывным контролем технической исправности входящих в систему средств (для этого применяется встроенный контроль и тестовая проверка БЦВМ) и контролем условий функционирования системы (например, если уровень шумов РНС и ДИСС выше допустимого, то соответствующее средство для коррекции не применяется). Если имеется техническая неисправность или нарушено условие нормального функционирования
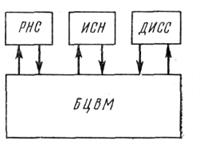
Рис. 3. Схема связей БЦВМ с навигационными системами то это ведет к запрещению использования информации от средств коррекции.
В комплексных навигационных системах радиотехнические средства используются для коррекции инерциальной системы, а эта последняя, являясь активной памятью, служит для коррекции радиотехнических средств. Например, по данным инерциальной системы могут быть определены вторые производные от дальностей, измеряемых РНС. Благодаря этому устраняются динамические погрешности РНС и становится возможным уменьшить полосу пропускания приемной аппаратуры, повысить ее помехозащищенность и снизить уровень шумов. Аналогично улучшаются характеристики доплеровского измерителя.
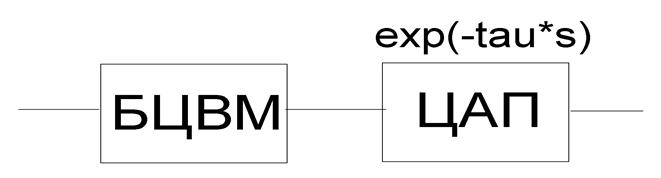
ЦАП является экстраполятором нулевого порядка, из-за чего в системе наблюдается чистое запаздывание – влияние на устойчивость.
В расчетах устойчивости следует принимать ![]()
На обработку информации в самой БЦВМ затрачивается время ![]()
![]() - фазовый сдвиг
- фазовый сдвиг
![]() -потери фазы в системе,
обусловленные дискретностью.
-потери фазы в системе,
обусловленные дискретностью.
Вторая неприятность в БЦВС – стробоскопические эффекты.(наложение частот fn Найквиста и реальной fpeal).
Для устранения этих проблем применяются активная и пассивная самонастройки.
Кх – произвольный параметр автопилота. ![]()
![]()
![]() -номер канала (пр.-10Гц,
40Гц, 80Гц)
-номер канала (пр.-10Гц,
40Гц, 80Гц) ![]() - переменные неограниченные
добавки.
- переменные неограниченные
добавки.
![]()
![]()
![]() высота,
высота, ![]() параметр.
параметр.
Кх0и Nx скачкообразно меняются по логическим условиям при переходе от одного параметра к другому.
Пассивная самоностройка:
Нужно учитывать затраты времени на вычисления в БЦВ
Билет №17
1. Управление разворотом ЛА без просадки по высоте полета.
Координированный разворот
Z – поперечная (боковая) аэродинамическая сила.
![]() ;
;
 .
(*)
.
(*)
Правильным разворотом называется координированный разворот с нулевым углом скольжения без просадки по высоте.
Если
![]() , то разворот координированный. Если
, то разворот координированный. Если ![]() и
и  ,
то разворот правильный.
,
то разворот правильный.
При
правильном развороте допустимый угол крена определяется ограничением на
допустимую перегрузку  .
.
В общем случае разворот бывает неправильным. Легко видеть, что
![]() .
.
Если управление ведется по перегрузкам, то условия (*) обычно бывает достаточно. Необходимое условие потери высоты может быть представлено и в других эквивалентных формулах.
![]() – произвольный
коэффициент поперечной силы по углу атаки,
– произвольный
коэффициент поперечной силы по углу атаки,
![]() – статически
устойчивый ЛА.
– статически
устойчивый ЛА.
Степень
статической устойчивости ![]() (разбег между
ц.д. ц.м.). Ц.д. должен быть за ц.м.
(разбег между
ц.д. ц.м.). Ц.д. должен быть за ц.м.
 (% САХ).
(% САХ).
Идеальный случай если 2-4% САХ.
“Нейтральный ЛА”
![]() .
.
Если
![]() , то ЛА статически устойчив.
, то ЛА статически устойчив.

 .
.
 ,
,
 ,
,
 .
.
Если
нам доступно измерение ![]() , то полученному
выражению можно придать следующую форму
, то полученному
выражению можно придать следующую форму
 ,
,
 ,
,
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.