неопределённость математической модели ОУ,
неопределённость характеристик среды функционирования,
неопределённость целевого условия.
Рассмотренные источнииы неопределённостей можно иллюстрировать следующим рисунком 1.4.
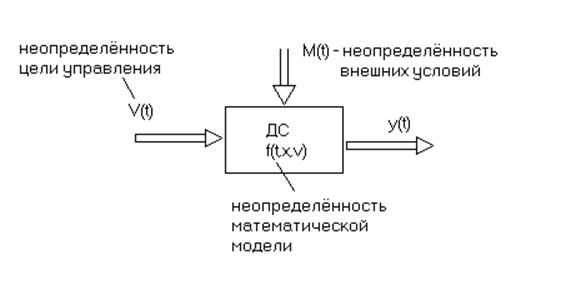
Рисунок 1.4
На рисунке 1.4 использованы обозначения: ДС – динамическая система, f(.) – математическая модель системы,
V (t) – вектор входных воздействий, M (t) – вектор возмущающих воздействий, y (t) – вектор выходных переменных.
Отметим, что регулятор, обеспечивающий устойчивость системы, может обеспечить заданную точность только при ограниченном диапазоне вариаций характеристик ОУ и условий его функционирования.
1.5.2 Виды неопределённостей
Параметрическая неопределённость
Данный вид неопределённостей означает зависимость свойств (характеристик) ОУ от неизвестных параметров (массы, момента инерции, коэффициента жесткости и т д). Параметры могут быть неизвестными постоянными или медленно меняющимися по сравнению с другими процессами в замкнутой системе. Принято соотносить темп изменения параметров с темпом переходного процесса или темпом изменения переменных состояния объекта.
Если параметры изменяются медленно по сравнению с изменением состояния объекта (x(t)), то в изменениях переменных состояния накапливается достаточно информации о дрейфе параметров.
Предположение о медленном изменении неизвестных параметров называется гипотезой квазистационарности. Практически это означает, что параметры объекта считаются постоянными или «замороженными». При этом объект также называется квазистационарным или «объектом с замороженными коэффициентами».
Параметры могут быть неизвестными и переменными. Темп их изменения сравним с темпом процессов в объекте управления или темпом изменения внешних воздействий. Параметрическая неопределённость может быть априорной или текущей. Динамические системы с таким видом параметрической неопределённости называются нестационарными.
Случай параметрической неопределённости объекта является наиболее изученным в теории адаптивного управления.
Пример 1.1. В безредукторном электроприводе вал двигателя непосредственно соединён с нагрузкой. Такая схема применяется, например, в мехатронных поворотных столах. При отсутствии редуктора уравнение вращающихся масс электропривода (без учёта внешнего возмущающего момента) имеет вид:
![]() (1.1)
(1.1)
где j - угол поворота вала, Jg– момент инерции якоря электродвигателя, Jн – момент инерции нагрузки, kс – коэффициент скоростного трения, Мg- вращающий момент. Обычно Jн>> Jg, кроме того, во многих практических случаях Jн заранее точно не известен. Как правило, задаются только диапазоном возможных значений Jн :
Jн min ≤ Jн ≤ Jн max.
Если диапазон значений достаточно широк, то модель (1.1) считается априорно параметрически неопределённой. Введём обозначения в уравнение (1.1):
y= j, u= Mg , a20= Jg, a21(t)= Jн.
C учётом принятых обозначений исходноу уравнение примет вид
![]() .
.
Если (а20 + а21(t))
¹ 0 ( для 0≤
t<¥) , то
можно преобразовать полученное уравнение, т.е. ![]() ,
,

Коэффициенты а̃1(t), b̃(t) характеризуют параметрическую неопределённость.
Значительное влияние на поведение реальных систем управления оказывает окружающая среда (влажность, температура, скорость движения воздушных масс, характеристики нагрузки и т.д.) Неопределённость внешних условий учитывается в математической модели в виде возмущающих воздействий и (или) сигналов задания.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.