Алгоритм настройки коэффициентов согласно (3.1), (3.15), (3.17) имеет вид
![]()
или
![]() (3.18)
(3.18)
Структурная схема адаптивной системы (3.2), (3.12), (3.18) изображена на рисунке 3.3,
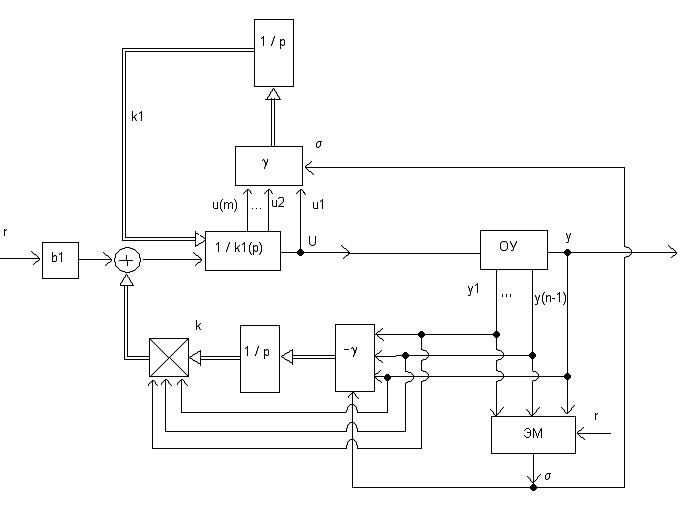
Рисунок 3.3.
где
приняты следующие обозначения ![]() ,
, ![]()
![]() .
.
Пример 3.1.
Выполним расчет адаптивной системы для наиболее простого случая. С этой целью рассмотрим объект управления первого порядка
![]() , (3.19)
, (3.19)
здесь a0 (t), b0 (t) – неизвестные медленноменяющиеся параметры. Процессы в системе должны удовлетворять следующим показателям качества: s% » 0%, tn £ 3c, а в установившемся режиме должно выполняться предельное неравенство
![]()
В соответствии с заданными показателями качества определим дифференциальное уравнение эталонной модели
![]() (3.20)
(3.20)
Согласно (3.12) и (3.18) уравнения регулятора и адаптора имеют вид
![]()
![]()
![]()
![]() (3.21)
(3.21)
Структурная схема системы с градиентным алгоритмом адаптации имеет вид,
изображенный на рисунке 3.4, на котором принятые обозначения: ![]() ,
, ![]() .
.
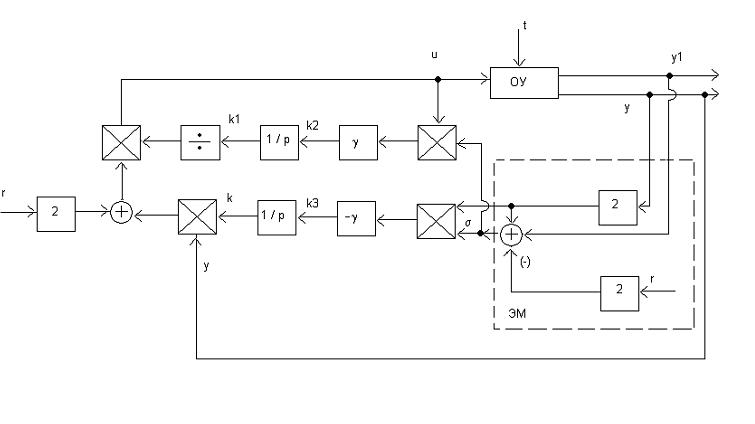
Рисунок 3.4
3.3 Синтез адаптивных систем по схеме скоростного градиента
3.3.1 Общая характеристика схемы скоростного градиента
Суть метода скоростного градиента заключается в следующем: настройка параметров осуществляется в направлении, противоположном скорости изменения целевого функционала вдоль траектории обобщенного настраиваемого объекта .
Идея схемы скоростного градиента принадлежит Красовскому А.А., который для задачи идентификации с адаптивной моделью предложил общий вид алгоритма адаптации, оптимального по критерию обобщенной работы. Алгоритм скоростного градиента (АСГ) нашел дальнейшее развитие в работах А.Л.Фрадкова, Б.Р.Андриевского и других специалистов в области теории управления.
Алгоритмом скоростного градиента принято называть правило изменения вектора настраиваемых коэффициентов (q), задаваемое уравнением вида
 (3.22)
(3.22)
где Ñ- дифференциальный оператор, Г = Г Т > 0 – квадратная матрица коэффициентов передачи,

здесь Q(.) – целевой функционал, f (x,q,t) – вектор-функция, описывающая ОНО,
![]()
y(.) – вектор-функция, удовлетворяющая условию псевдоградиентности:
![]()
Это условие эквивалентно требованию, чтобы угол j между векторами y и w лежал в пределах от - 900 до + 900 (рисунок 3.5). Условие псевдоградиентности выполняется, если
![]() или
или ![]()
(аргументы вектор-функции опущены для упрощения записи выражений),
ГiT = Гi > 0 – квадратная матрица коэффициентов (i = 1, 2), Г2 – диагональная матрица, sign (.) – вектор состоящий из знаков компонент вектора Ñq w .
 |
y
![]() j - 900
≤ j ≤ 900
j - 900
≤ j ≤ 900
![]()
Ñq w
Рисунок 3.5
АСГ вида (3.22) называют алгоритмом в конечно-дифференциальной форме. Частными случаями (3.22) являются алгоритмы в дифференциальной форме (при y = 0)
 (3.23)
(3.23)
и в конечной форме (для Г = 0)
![]() (3.24)
(3.24)
где g - шаг дискретизации.
3.3.2 АСГ в системах с явной реализацией эталонной модели
Рассмотрим пример синтеза системы с параметрической адаптацией. Сформулируем задачу синтеза для объекта управления, который задан моделью в пространстве состояний
![]() (3.25)
(3.25)
где
xÎRn,
uÎRm – векторы состояния и входа ОУ, ![]() ,
, ![]() –
матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь,
что значения коэффициентов ограничены по модулю, т.е.
–
матрицы неизвестных коэффициентов соответствующих размерностей, известно лишь,
что значения коэффициентов ограничены по модулю, т.е.
![]() для всех i, j,
r, p.
для всех i, j,
r, p.
Эталонная модель выбрана в форме
![]() (3.26)
(3.26)
где rÎRm– задающее воздействие, Ам – гурвицева матрица.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.