![]()
![]() .
.
Вторая составляющая уравнения обращается в ноль, если
![]()
 (3.54)
(3.54)
Уравнение (3.54) описывает алгоритм адаптации в отклонениях. Производная исследуемой функции принимает вид
![]()
отрицательная определенность следует из свойства гурвицевости матрицы коэффициентов эталонной модели и положительности матрицы Н, удовлетворяющей уравнению Ляпунова:
![]()
Полагая медленное изменение коэффициентов ![]() и учитывая ранее введенные обозначения, получим вид
алгоритмов адаптации:
и учитывая ранее введенные обозначения, получим вид
алгоритмов адаптации:
![]() , (3.55)
, (3.55)
![]()
![]()
![]()
![]()
![]()
Структурная схема адаптивной
системы (3.25), (3.26), (3.46), (3.55) изображена на рисунке 3.8 . Для
обозначения элементов схемы приняты обозначения: ![]() .
.
Условия, при которых решена поставленная задача,
являются условиями идентифицируемости ![]() при
при ![]() и, одновременно, условиями асимптотической
устойчивости в целом
и, одновременно, условиями асимптотической
устойчивости в целом ![]()
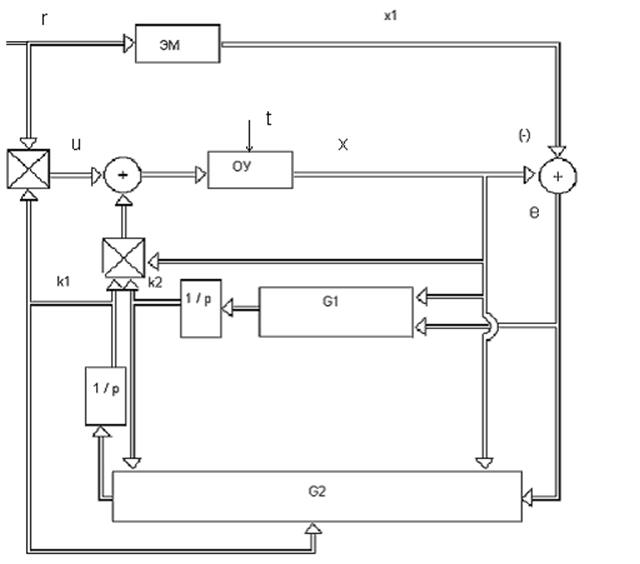
Рисунок 3.8.
Пример 3.3. Пусть модель объект управления задана уравнением (3.19). Желаемая динамика системы соответствует (3.37). Учитывая координатное рассогласование (3.38), положительно определенная функция (3.53) имеет вид
![]()
при Н = 1, g > 0, а ее производная
![]()
так как ![]()
Тогда согласно (3.50) и (3.55) уравнения адаптивного регулятора следующие
![]()
![]() (3.56)
(3.56)
![]()
где 
Адаптивная система (3.19),
(3.37), (3.56) представлена в виде структурной схемы на рисунке 3.9. На
рисунке приняты следующие обозначения: ![]()
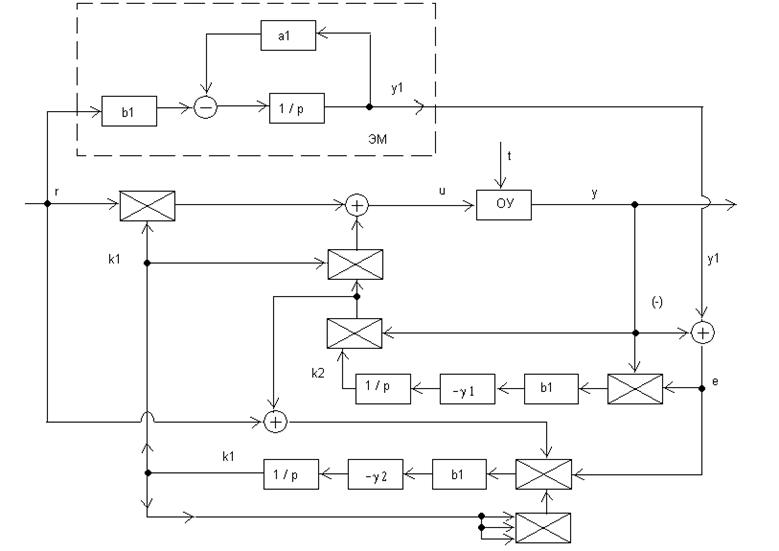
Рисунок 3.9.
4. СИНТЕЗ СИСТЕМ АДАПТИВНОГО УПРАВЛЕНИЯ НА ОСНОВЕ МЕТОДА ВЕКТОРА СКОРОСТИ
4.1 Расчет и анализ свойств многоканальной адаптивной системы
Стабилизация динамических характеристик систем с непрерывными нестационарными объектами осуществляется с помощью нелинейного адаптивного регулятора, синтез которого выполнен на основе метода вектора скорости. В случае одноканальных систем элементы вектора скорости часто совпадают с производными выходной переменной, поэтому применительно к этому классу систем метод можно назвать методом старшей производной. В процессе работы системы собирается и анализируется априори неизвестная информация о свойствах объекта управления. Основным источником такой информации являются производные выходной переменной или вектор первых производных координат состояния. Полученная информация используется в адапторе для изменения значений коэффициентов регулятора. Это позволяет создать «быстрый» адаптор для парирования быстроменяющихся возмущения. Оценивание требуемых производных осуществляется с помощью малоинерционного линейного фильтра.
4.1.1 Описание задачи
Рассмотрим класс нестационарных нелинейных объектов, модель которых в пространстве состояний имеет вид:
 (4.1)
(4.1)
где y, x, u, a - соответственно векторы выходных переменных, координат состояния, управляющих воздействий, неконтролируемых возмущений, f1 - известная, ограниченная, непрерывно дифференцируемая вектор - функция, f2 - взаимооднозначная, непрерывно дифференцируемая по всем аргументам вектор - функция, компоненты которой и частные производные по a, x ограничены, то есть требуется выполнение условия Липшица. В общем случае f2 может иметь гладкие нелинейности, но должно выполняться требование линейности по неизвестным параметрам; С и В - известные матрицы коэффициентов,
det (C B) ¹ 0. Априорно известно, что a (t) принадлежит ограниченному нестационарному множеству значений a (t) ÎWm, в котором aj (t) удовлетворяют условию
![]() (4.2)
(4.2)
где h j - известны; причем элементы вектора неконтролируемых возмущений могут менять знак, что в случае параметрических возмущений приводит к потере устойчивости объекта. Темп неконтролируемых возмущений может быть соизмерим с темпом переходного процесса.
Цель управления состоит в переводе системы из произвольных начальных условий в допустимую ограниченную область, определенную относительно заданного состояния, независимо от действия неконтролируемых возмущений. Перевод объекта из любых начальных условий (y (t0)) в заданную точку пространства выходных переменных должен осуществляться в соответствии с уравнением
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.