Перейдем к рассмотрению модифицированной модели второго вида (4.16)

 , (4.27)
, (4.27)
изменение которых подчиняются алгоритмам (4.20 А):
 (4.28)
(4.28)
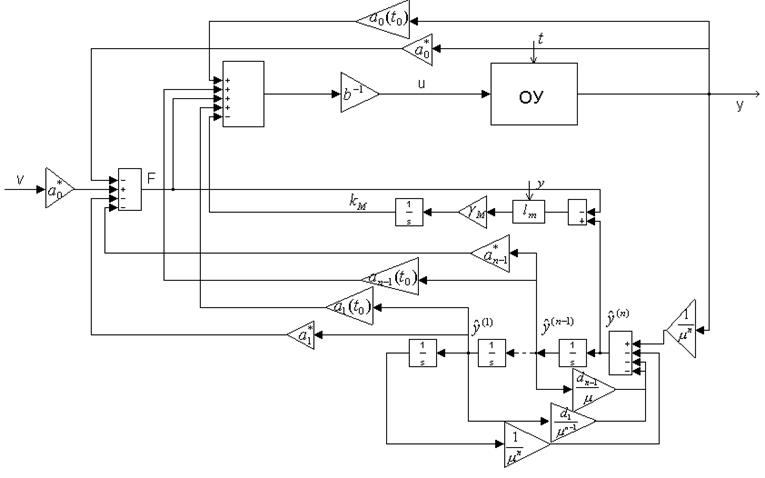
Рисунок 4.10 Структурная схема адаптивной системы с одним контуром адаптации
Уравнения системы с
сигнально-параметрической адаптацией, записанные в расширенном пространстве
состояний ![]() имеют вид:
имеют вид:  (4.29)
(4.29)
Уравнения (4.29) описывают
систему пониженного порядка с сигнально-параметрической адаптацией. Порядок
адаптивной системы с двумя контурами адаптации равен ![]() Структурная
схема адаптивной системы пониженного порядка (4.29) представлена на рисунке
4.11.
Структурная
схема адаптивной системы пониженного порядка (4.29) представлена на рисунке
4.11.
Вид
переходных процессов в одноканальной стационарной системе определяется
расположением корней ![]() характеристического многочлена.
Поэтому формирование желаемого дифференциального уравнения связано с заданием
корней характеристического многочлена.
характеристического многочлена.
Поэтому формирование желаемого дифференциального уравнения связано с заданием
корней характеристического многочлена.
Рисунок 4.11. Структурная схема адаптивной системы с двумя контурами адаптации
Порядок
желаемого дифференциального уравнения определяется порядком объекта управления
(4.9). Поэтому выбираем n корней ![]()
![]()
![]() , часть из которых может быть
комплексно-сопряженными корнями, и формируем желаемое характеристическое
уравнение:
, часть из которых может быть
комплексно-сопряженными корнями, и формируем желаемое характеристическое
уравнение:
![]()
или после раскрытия скобок
![]() (4.30)
(4.30)
Согласно (4.30) запишем однородное дифференциальное уравнение:
![]()
Так как цель управления заключается в стабилизации выходной переменной системы, то желаемое дифференциальное уравнение системы имеет вид:
![]()
Реализация выбранного закона управления предполагает введение в систему фильтра оценки производных. Порядок фильтра определяется порядком старшей производной выходной переменной, которая используется в адаптивном законе управления. С целью уменьшения влияния динамики фильтра оценки производных на свойства замкнутой системы его постоянная времени должна быть на порядок меньше минимальной постоянной времени блока желаемой динамики. Таким образом, процессы в фильтре должны быть на порядок быстрее желаемых процессов на выходе системы.
Так как необходимо оценивать n производных, то дифференциальное уравнение фильтра имеет вид:
![]() (2.37)
(2.37)
где
![]()
![]() – оценка соответственно i-ой производной выходной переменной системы.
Степень быстродействия фильтра определяется согласно выражению:
– оценка соответственно i-ой производной выходной переменной системы.
Степень быстродействия фильтра определяется согласно выражению:  .
.
Рассмотрим адаптивную систему с одним контуром
адаптации вида (4.26). После определения коэффициентов блока желаемой динамики
и параметров фильтра, необходимо найти значения коэффициента передачи адаптора.
Последняя задача может быть решена с помощью второго метода Ляпунова.
Полагаем, что требуемые оценки производных координат состояний известны точно и
![]() где
где ![]() –
ограниченная рабочая область координат состояния.
–
ограниченная рабочая область координат состояния.
Введем координатное и параметрическое рассогласования,
а затем установим зависимость между. Пусть рассогласование между настаиваемым
параметром регулятора ![]() и структурно-параметрическим
возмущением
и структурно-параметрическим
возмущением ![]() оценивается по выражению
оценивается по выражению
![]() ,
,
а отклонение траектории движения системы от желаемой характеризуется переменной
![]() .
.
Подставим в уравнение объекта (4.13) закон управления (4.24), в результате получим:
 (4.31)
(4.31)
Тогда согласно введенным рассогласованиям и уравнению (4.31) следует справедливость выражения
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.