Министерство общего и профессионального образования России
Санкт-Петербургский государственный политехнический университет
Механико-Машиностроительный Факультет
Кафедра «Теория механизмов и машин»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ НА ТЕМУ
Кинематический и силовой анализ рычажных механизмов
Студент Додонов С.С., гр.2041/1
Руководитель работы Петров Г.Н.
Санкт-Петербург
2011 год
Содержание
Введение. 4
Исходные данные. 5
Механизм 1 - Часть 1. 6
1. Структурный анализ механизма. 6
2. Геометрический анализ механизма. 8
2.1. Групповые уравнения и их решение. 8
2.2. План 12 положений механизма. 12
3. Кинематический анализ механизма. 13
3.1. Аналитическое определение аналогов скоростей и ускорений. 13
3.2. Механизм в крайних положениях. 17
3.3. Планы аналогов скоростей и ускорений. 18
4. Графики функции положения и её производных по обобщенной координате. 23
5. Сравнение результатов расчётов, полученных разными методами. 24
Механизм 1 - Часть 2. 25
1. Определение задаваемых сил и сил инерции. 25
2. Составление уравнений кинетостатики. 26
3. Планы сил. 28
4. Сравнение результатов расчётов, полученных разными методами. 31
Механизм 2 - Часть 1. 32
1. Структурный анализ механизма. 32
2. Геометрический анализ механизма. 34
2.1. Групповые уравнения и их решение. 34
2.2. План 12 положений механизма. 38
3. Кинематический анализ механизма. 39
3.1. Аналитическое определение аналогов скоростей и ускорений. 39
3.2. Механизм в крайних положениях. 43
3.3. Планы аналогов скоростей и ускорений. 44
4. Графики функции положения и её производных по обобщенной координате. 49
5. Сравнение результатов расчётов, полученных разными методами. 50
Механизм 2 - Часть 2. 51
1. Определение задаваемых сил и сил инерции. 51
2. Составление уравнений кинетостатики. 52
3. Планы сил. 55
Приложение 1. 58
1. Протокол MathCad для первого механизма. 58
2. Стандартная программа для первого механизма. 73
3. Планы аналогов скоростей и ускорений для первого механизма. 78
Приложение 2. 80
1. Протокол MathCad для второго механизма. 80
2. Стандартная программа для второго механизма. 95
3. Планы аналогов скоростей и ускорений для второго механизма. 100
Список литературы.. 102
Целью курсовой работы является изучение назначения, устройства и работы рычажного механизма, а также определение и расчет его параметров.
Исследования, проводимые с данным рычажным механизмом, делятся на две части:
В первой части курсовой работы проведены:
· структурный анализ, обеспечивающий определение состава и связей элементов механизма;
· геометрический анализ, включающий в себя составление плана двенадцати положений механизма в масштабе, групповые уравнения определенных точек и их решение (для одного положения проведено численное решение);
· кинематический анализ, в результате которого определен план скоростей и ускорений для двух положений механизма, а также получено аналитическое выражение аналогов скоростей и ускорений;
· графики функций положения и ее производных по обобщенной координате;
· сравнение результатов расчетов, полученных разными методами;
Во второй части курсовой работы, в соответствии с исходными данными, проведены исследования, в результате которых:
· определены задаваемые силы и силы инерции;
· составлены уравнения кинетостатики;
· осуществлено аналитическое решение составленных уравнений.
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, классификация последних, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
1) Звенья механизма: 1 – кривошип OA; 2- звено АВD; 3 – ползун В; 4 – шатун DЕ;
5 – ползун Е.
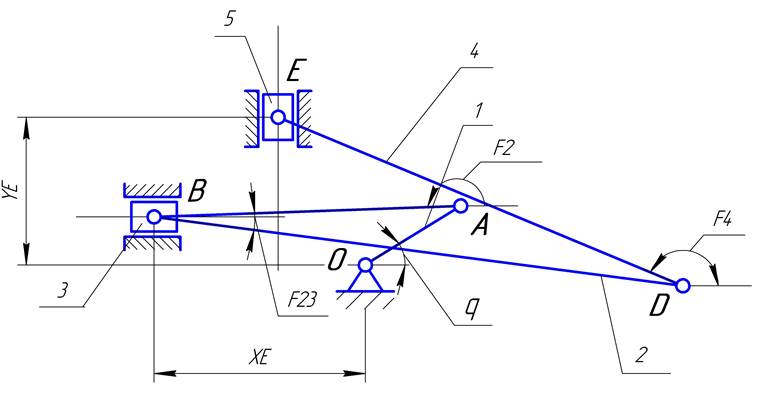
Рис.1.1. Схема механизма
2) n = 1 (один вход О-А).
3) Граф механизма
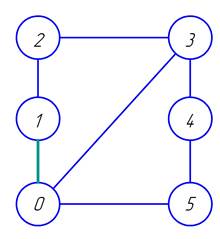
Рис.1.2. Граф механизма
4) Число подвижных звеньев механизма N = 5; количество кинематических пар совпадает с числом подвижностей пар P = S = 7.
5) K = P – N = 2, т.е. два независимых контура.
6) Число степеней подвижности по формуле Чебышева W = 3N – 2pн – pв = 3.5 – 2.7 = 1
7) W = n, то есть рассматривается нормальный механизм.
8) В плоскости движения нет избыточных связей и лишних подвижностей.
9) Разделение графа механизма на подграфы, соответствующие структурным группам.
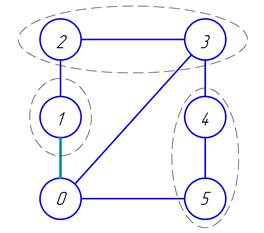
Рис.1.3. Граф механизма
10) Структурный граф механизма
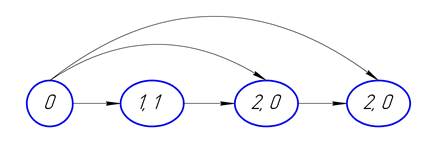
Рис.1.4. Структурный граф механизма
Механизм образован следующим образом: к стойке присоединяется однозвенная одноподвижная группа (звено 1) и две двухзвенные группы Ассура – ВВП1 (звенья 2 и 3) и ВВП2 (звенья 4 и 5).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.